收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
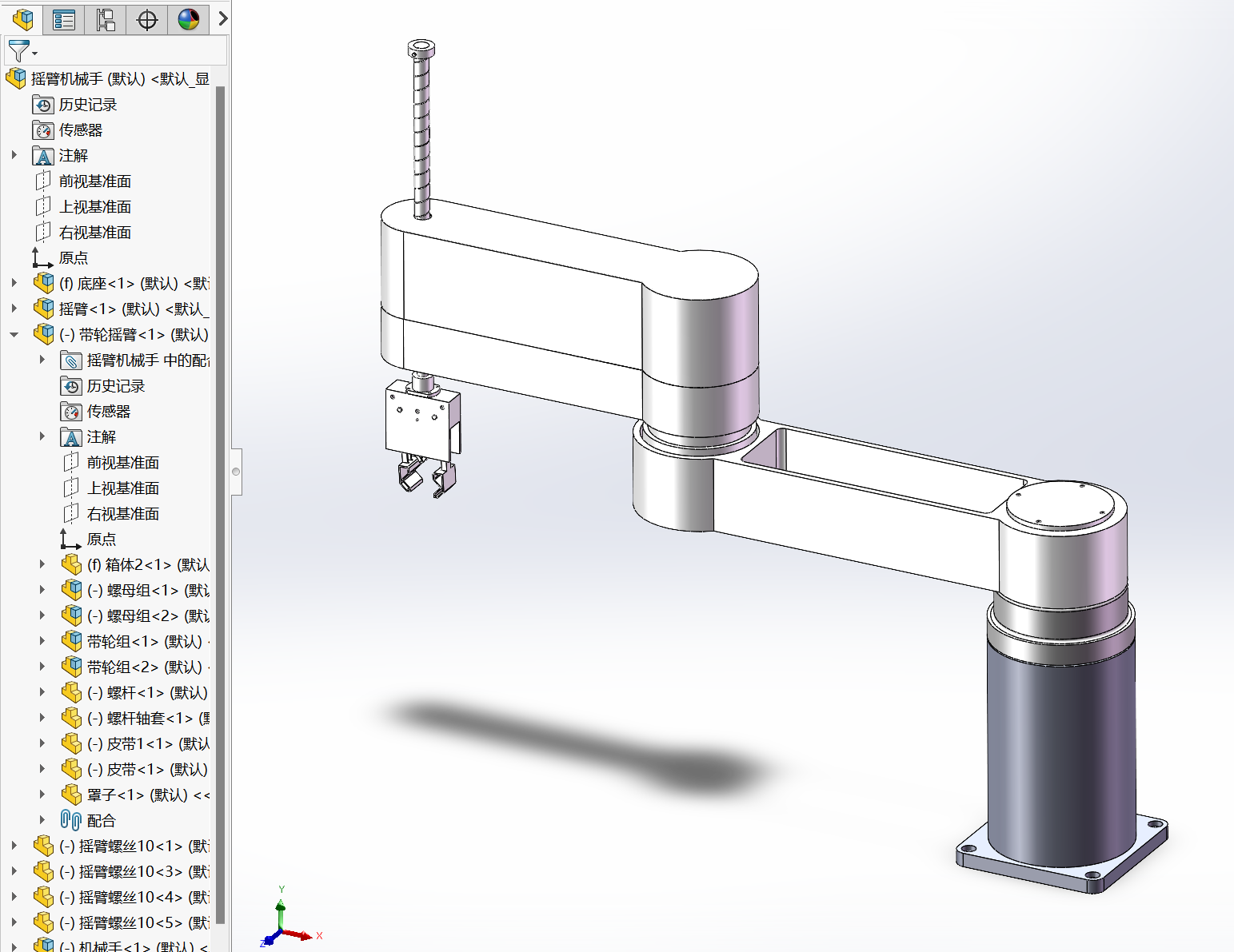
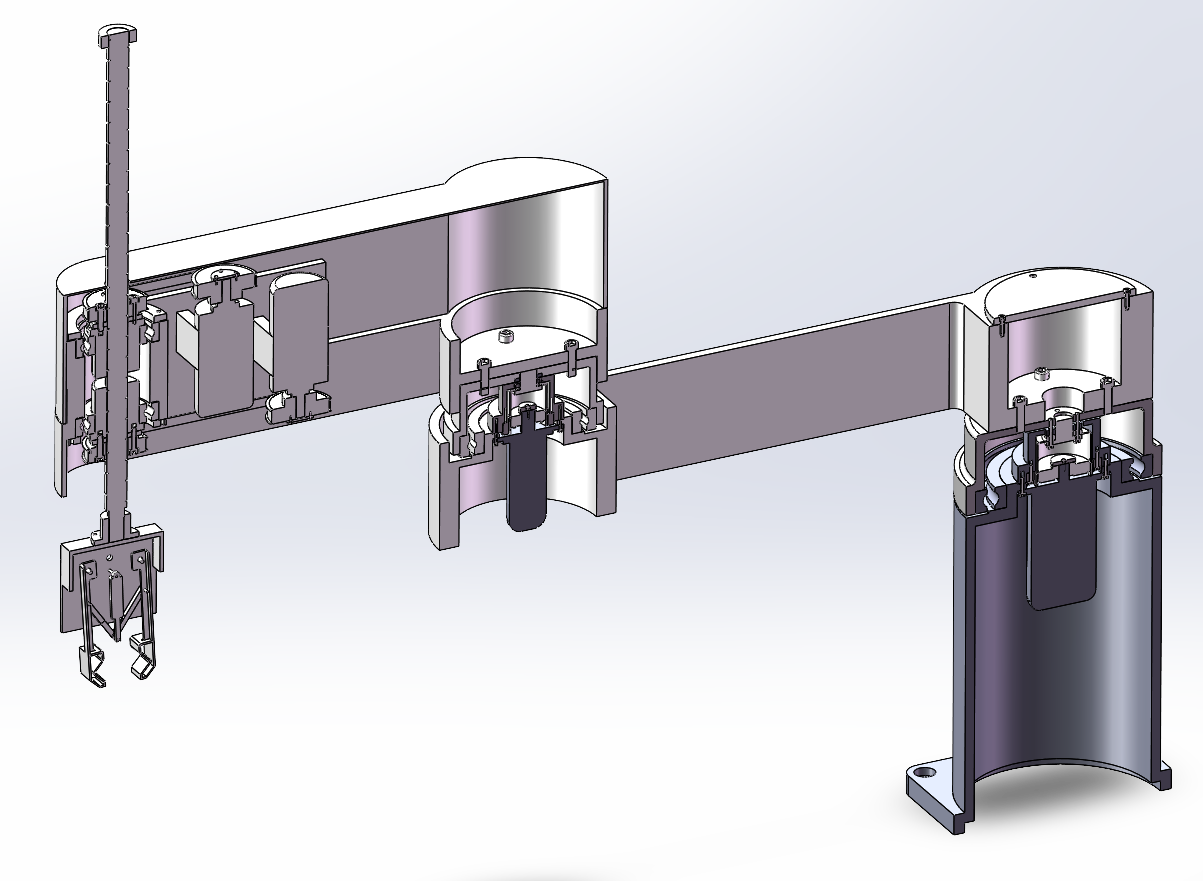
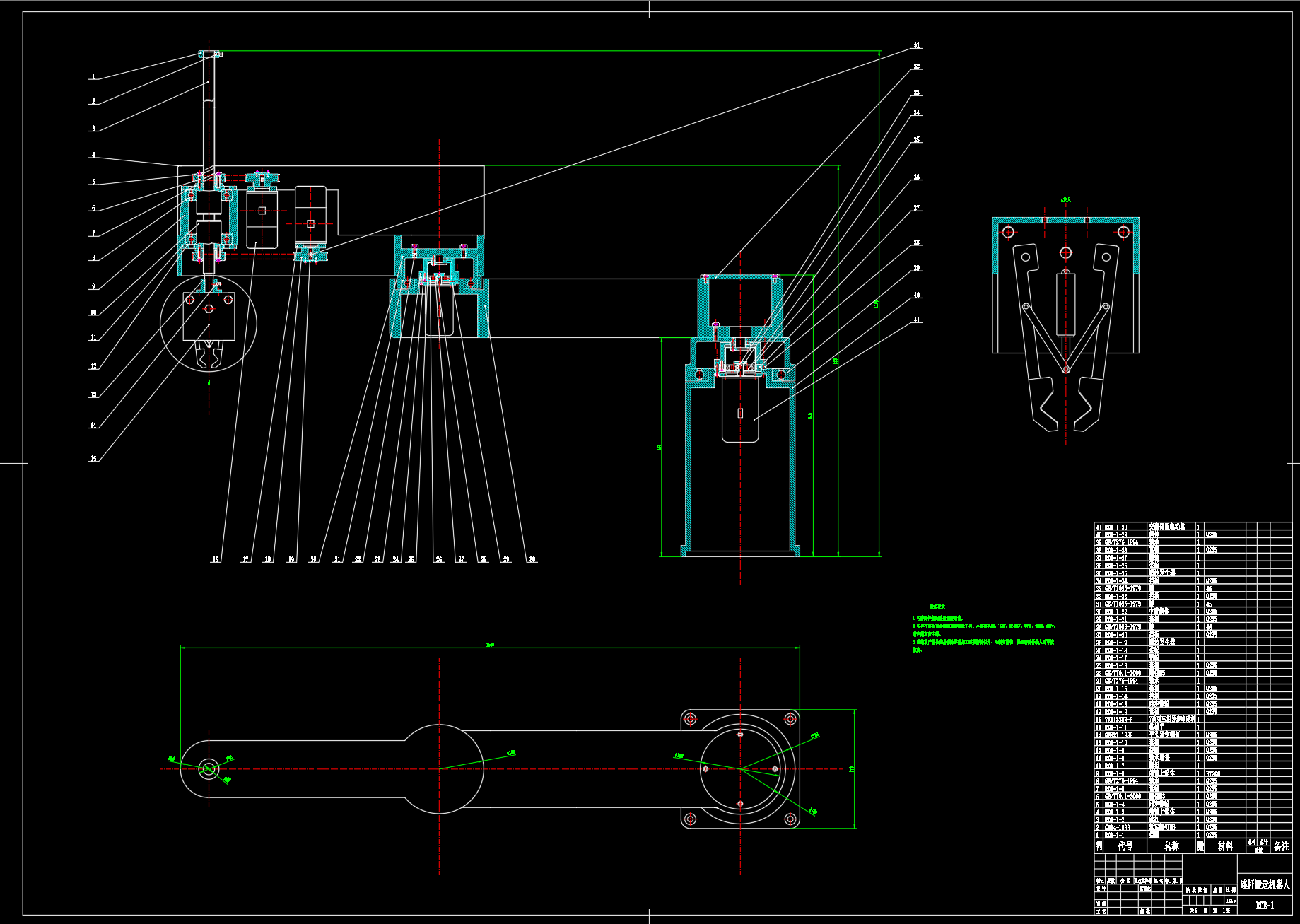
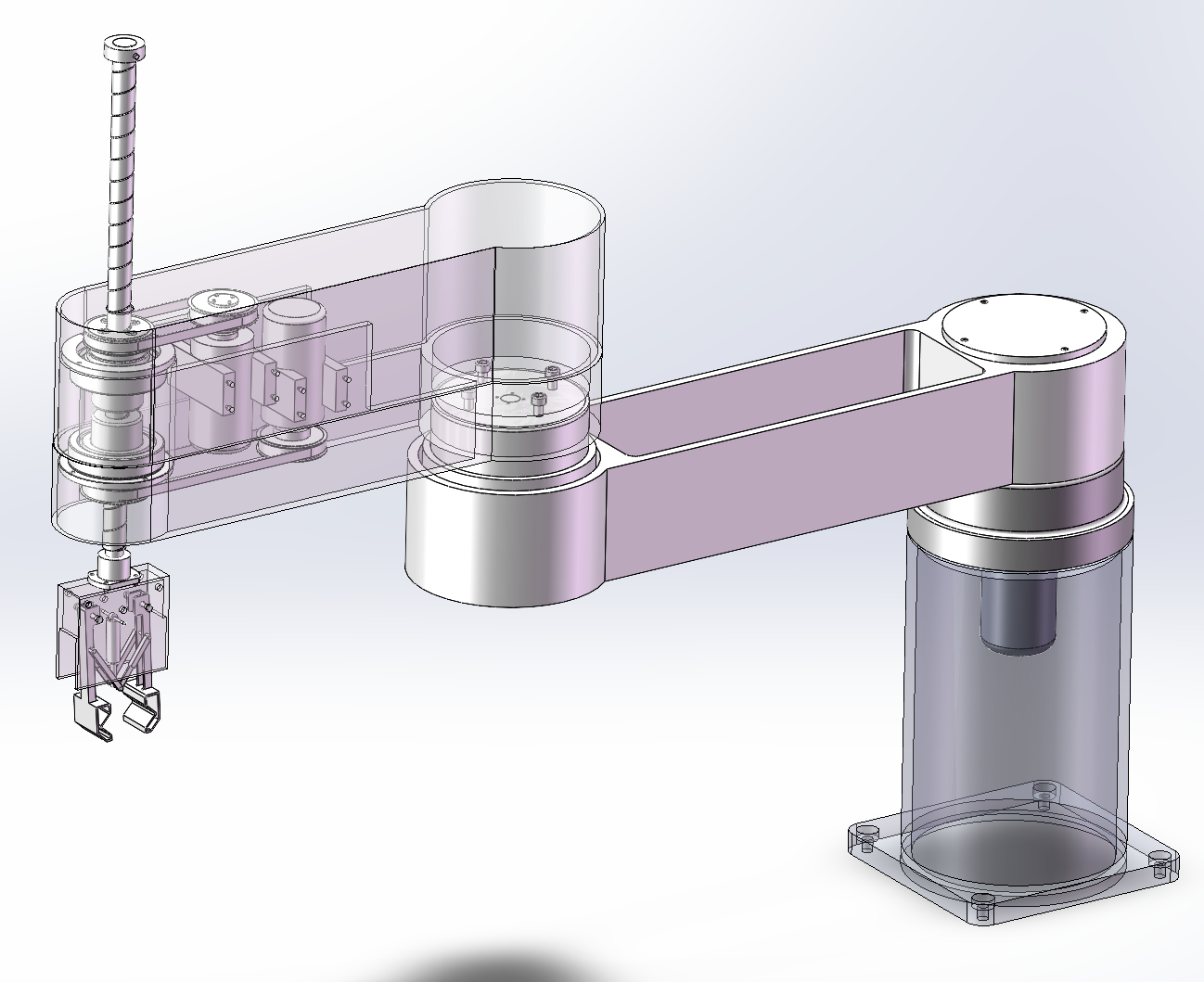
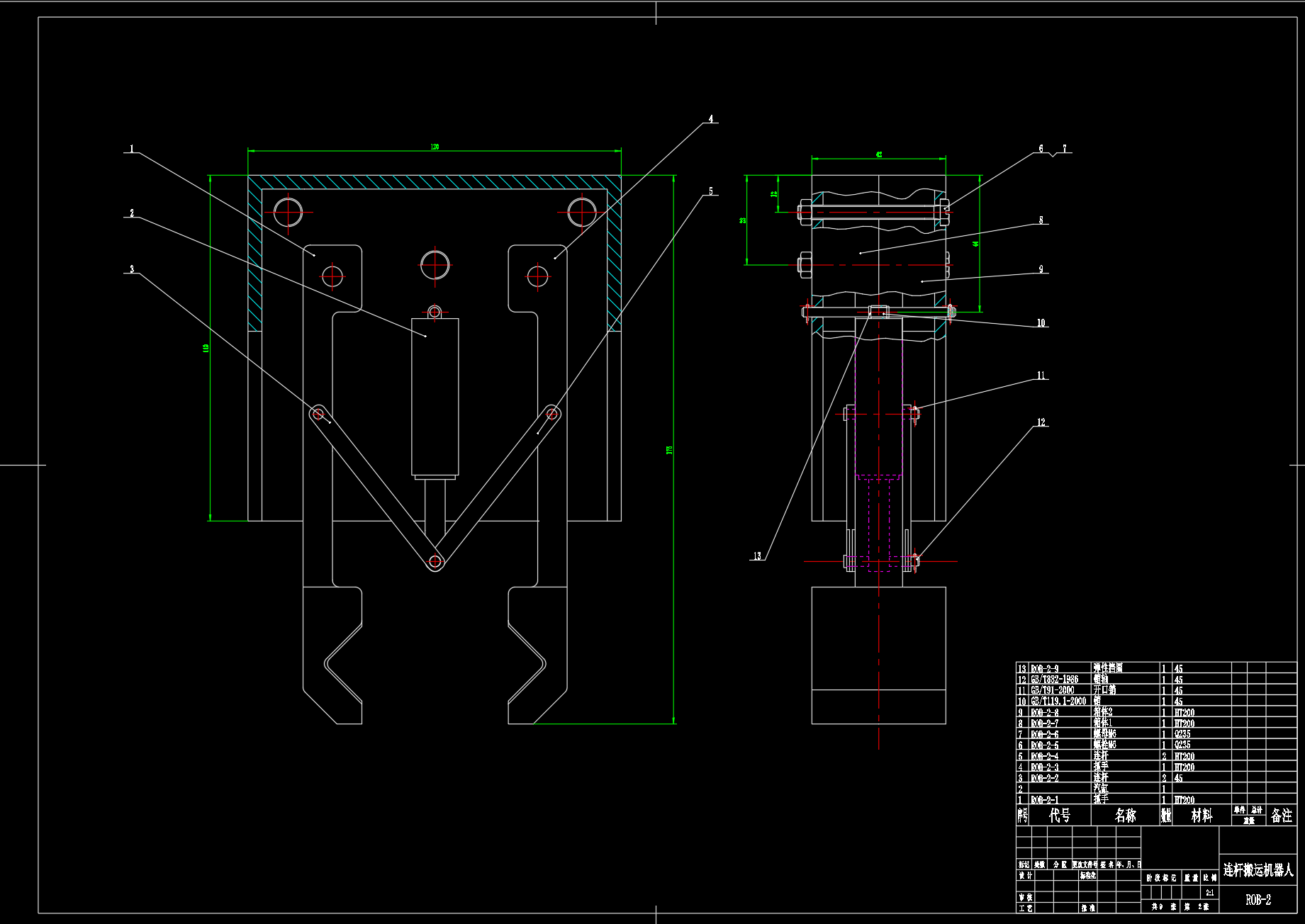
连杆加工搬运机器人设计【说明书+CAD图纸+SW三维+中英文翻译文献+任务书】
来源: 阅读:79
网站管理员
发布于 2025-12-28 19:13
查看主页
连杆加工搬运机器人设计聚焦提升自动化生产效能,通过整合机械结构与运动规划,实现加工环节中物料的精准转运与定位。配套的说明书、CAD图纸及SW三维模型,为设计流程提供系统路径,从零件选型、结构优化到整机装配均有清晰指引。中英文文献与任务书则为理论研究与实践应用提供双向支撑,有效降低设计难度,显著缩短周期,减少重复劳动。您所看到的图片均取自配套资源包,旨在为您提供直观、全面的内容概览,方便正式使用前进行了解和评估。请注意,资源包内的专业资料需在对应软件环境中打开,方可完整浏览、编辑或进一步使用。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
工艺夹具-CA1340杠杆工艺规程及铣槽夹具设计(说明书+CAD图纸+工序卡)
04/11
39
BL台式车床的进给结构的设计(论文+CAD图纸+开题报告+任务书……)
01/27
63
全长168米短隧道分离式独立双洞(计算书16页,CAD图3张)
02/08
67
20M3液氨储罐设计说明书
02/07
65
新井为大雁矿区四矿1.2mta的新井设计【论文、CAD图纸】
02/05
67
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn