2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
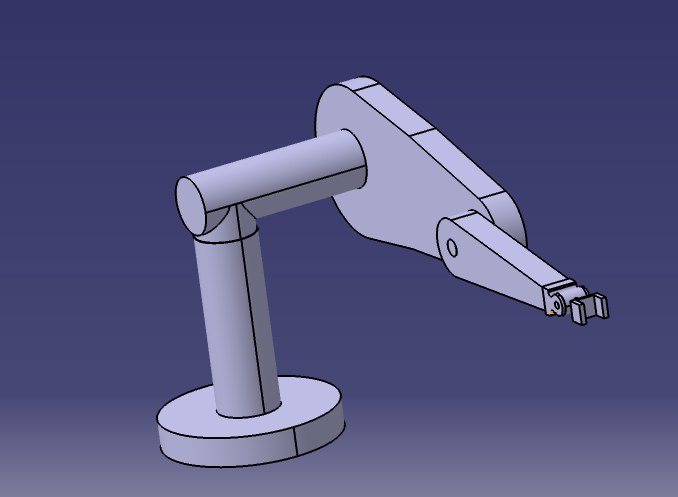
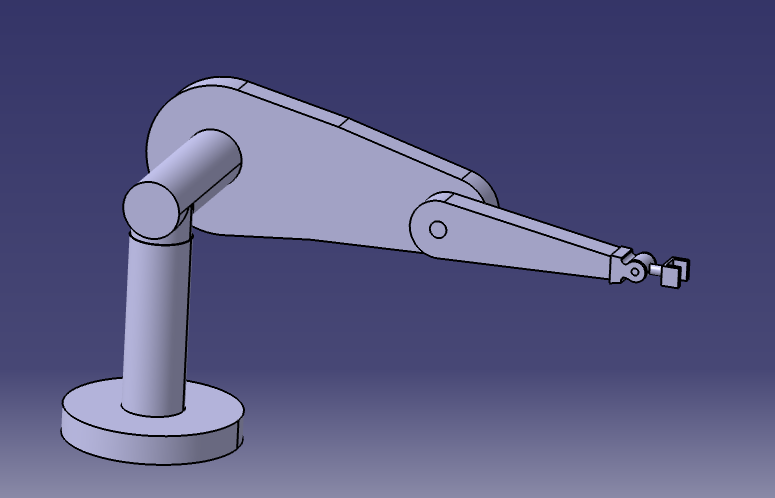
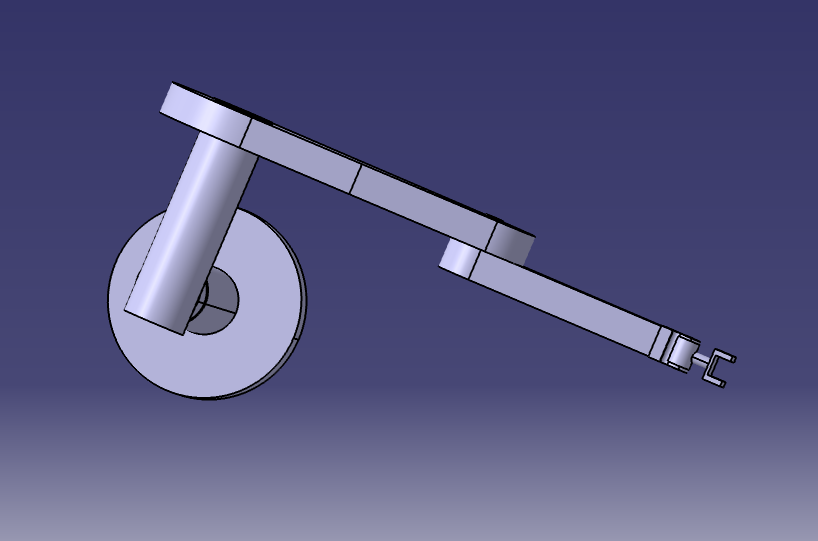
PUMA560机器人运动学分析
来源: 阅读:36
网站管理员
发布于 2026-04-08 05:00
查看主页
PUMA560机器人作为工业机械臂领域的经典案例,其运动学分析是理解机械臂操作能力的核心环节。运动学研究主要解决两个问题:一是根据关节角度推算末端执行器的位置与姿态,二是根据目标位姿反推各关节所需转动的角度。这种双向分析为机器人路径规划、任务执行提供了数学基础,确保机械臂能精准完成抓取、装配等操作。例如,在汽车零部件焊接场景中,通过运动学模型可快速计算各关节运动参数,避免碰撞并提升作业效率。
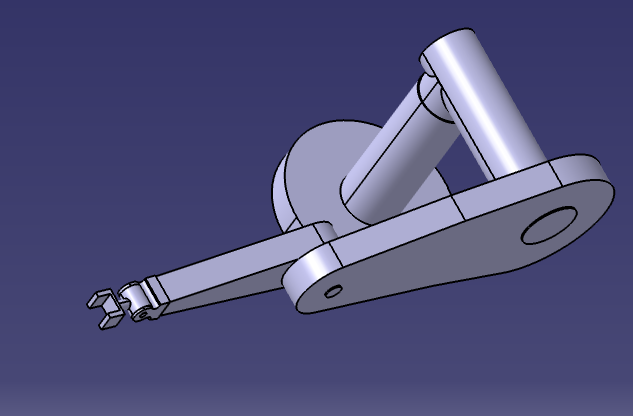
正向运动学通过建立关节坐标系与末端坐标系的转换关系,将旋转关节的转角、平移关节的位移转化为末端位姿。这一过程依赖齐次变换矩阵,通过逐级相乘实现从基座到末端的坐标传递。逆向运动学则复杂得多,需解非线性方程组,通常采用代数法或几何法简化计算。以PUMA560的6自由度结构为例,其腕部三关节的解存在多组解,需结合任务需求筛选最优解,这对算法的鲁棒性提出较高要求。
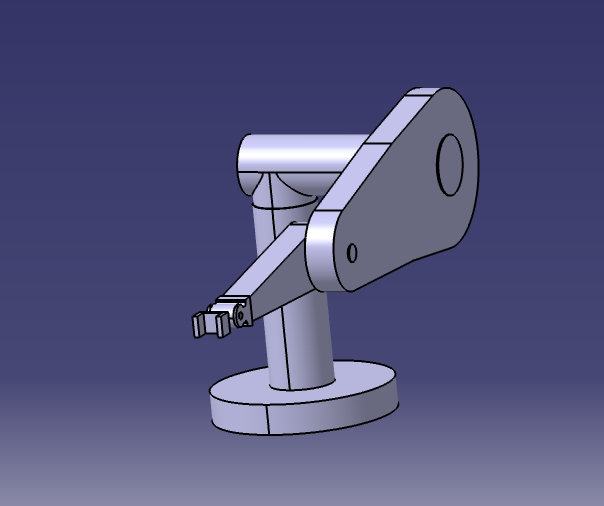
运动学分析的精度直接影响机器人作业质量。若模型存在误差,可能导致末端定位偏差,进而影响焊接精度或装配牢固度。因此,分析过程中需严格校准关节零点位置、连杆长度等参数,并通过传感器反馈实时修正模型。此外,运动学模型还需考虑关节运动范围限制,避免因超出物理极限导致机械损伤。这些细节决定了机器人能否在复杂环境中稳定运行。
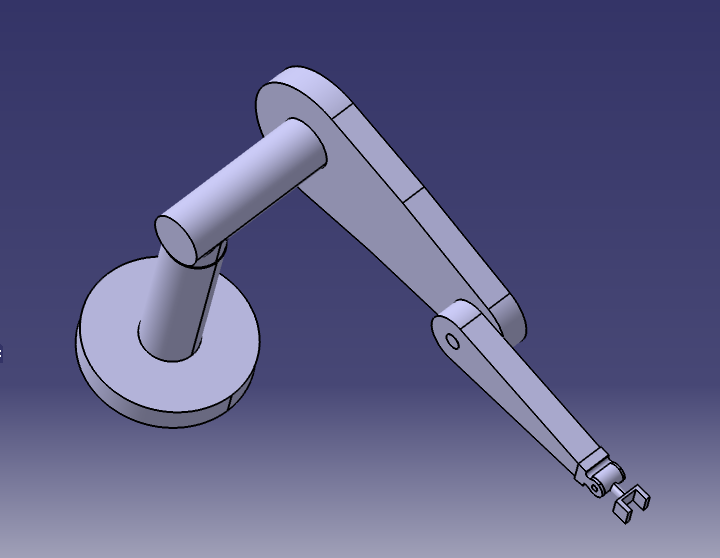
掌握PUMA560的运动学原理,不仅能帮助理解机械臂的运动逻辑,还可为自定义机械臂设计提供参考。通过调整连杆参数或关节配置,可快速验证新结构的运动可行性,显著缩短开发周期。对于学习者而言,深入分析此类经典案例,能夯实机器人技术基础,为后续研究控制算法或感知系统打下坚实基础。
本文仅为简要介绍,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
化工工艺仪表流程图PID
03/19
45
XX高层住宅楼小区电气设计【计算书约20000字左右、CAD图纸27张】
02/15
60
年产10000吨柠檬酸发酵工厂设计
01/26
75
小型家用多功能磨粉机SolidWorks三维
01/25
58
卧式搅拌器结构设计(论文+CAD图纸+PROE三维图+答辩PPT)
01/11
77
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn