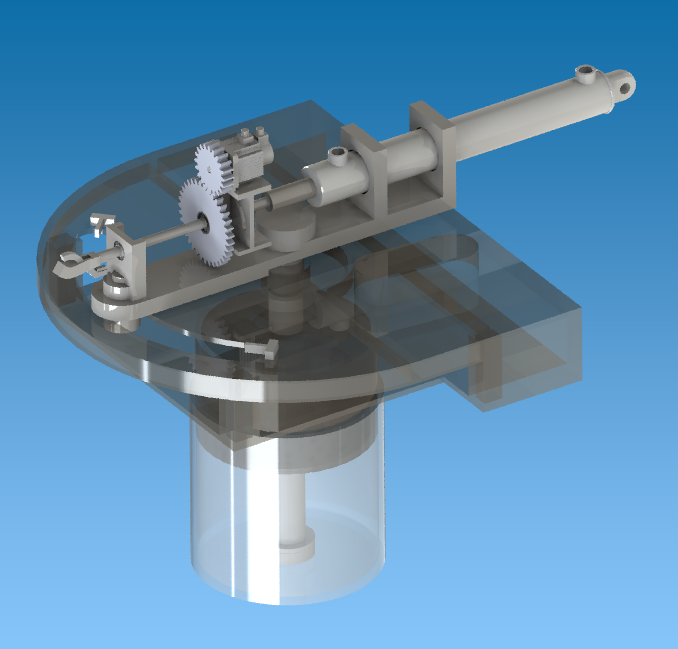
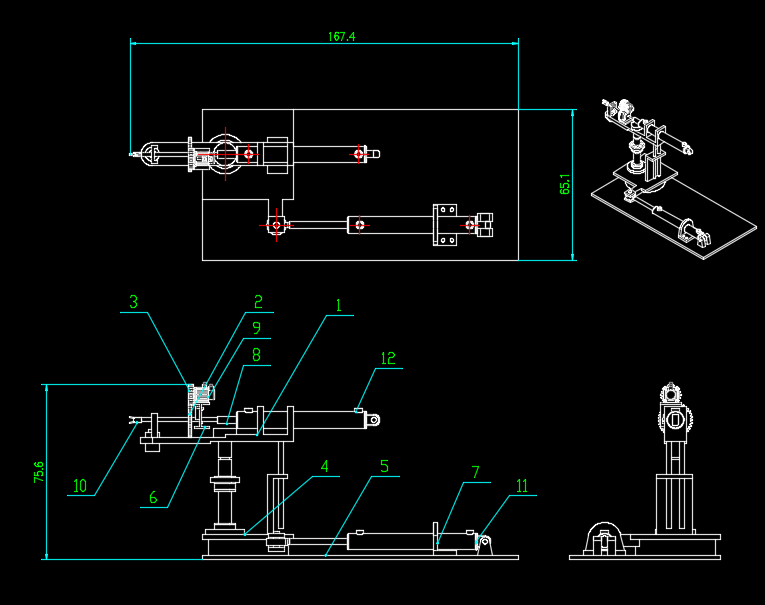
生产线转位装置是自动化设备中实现物料精准换向的核心模块,其核心作用在于通过机械结构的协同运作,将物料从当前工位转移至指定方向的新工位,确保多工序衔接的连续性与稳定性。该装置的设计需兼顾结构强度、定位精度与操作便捷性,通常由驱动机构、传动组件、导向系统及定位单元四部分构成。驱动机构提供动力源,传动组件将动力转化为线性或旋转运动,导向系统确保运动轨迹的准确性,定位单元则通过机械限位或传感器反馈实现精准停靠,四者协同完成转位动作。
设计过程中需重点关注运动平稳性与可靠性。传动组件多采用齿轮齿条或凸轮机构,前者适用于长距离转位,后者则通过轮廓曲线实现复杂运动轨迹;导向系统常选用直线导轨或滚珠花键,其低摩擦特性可显著降低能量损耗;定位单元需根据工况选择机械挡块或电磁制动,前者结构简单但精度有限,后者则通过电子信号控制实现微米级定位。此外,装置的模块化设计可提升通用性,通过更换部分零件即可适配不同尺寸的物料,显著缩短设计周期。
在CAD与SolidWorks建模阶段,需遵循“先整体后局部”的原则。首先构建装置的三维骨架模型,明确各部件的相对位置与运动关系;随后细化零件结构,添加倒角、退刀槽等工艺特征;最后通过装配体检查干涉情况,优化零件尺寸。建模过程中需特别注意公差配合,过盈配合可能引发卡滞,间隙配合则会导致定位偏差,需根据材料特性与加工精度合理选择配合类型。
开题阶段需明确研究目标与技术路线。研究目标应聚焦于解决现有装置的定位误差大、结构复杂或维护成本高等问题;技术路线则需涵盖需求分析、方案设计、建模优化与实验验证四个环节,其中需求分析需结合实际工况确定转位角度、负载重量等关键参数,方案设计需对比多种传动方案的优劣,建模优化需通过参数化设计实现快速迭代,实验验证则需通过实际运行测试装置的稳定性。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。