2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
平面关节型机械手设计(论文+DWG图纸)
来源: 阅读:55
网站管理员
发布于 2026-04-01 11:45
查看主页
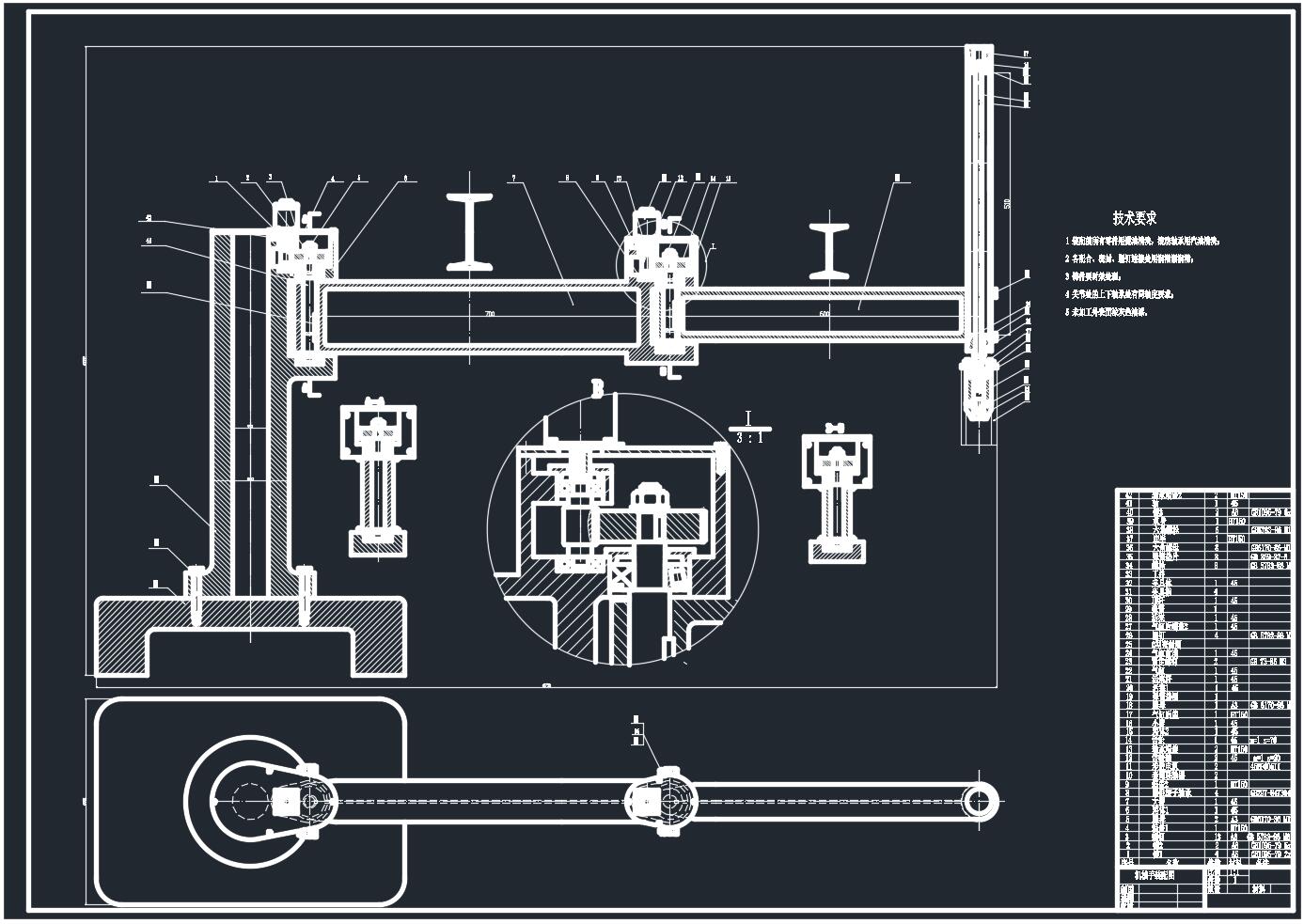
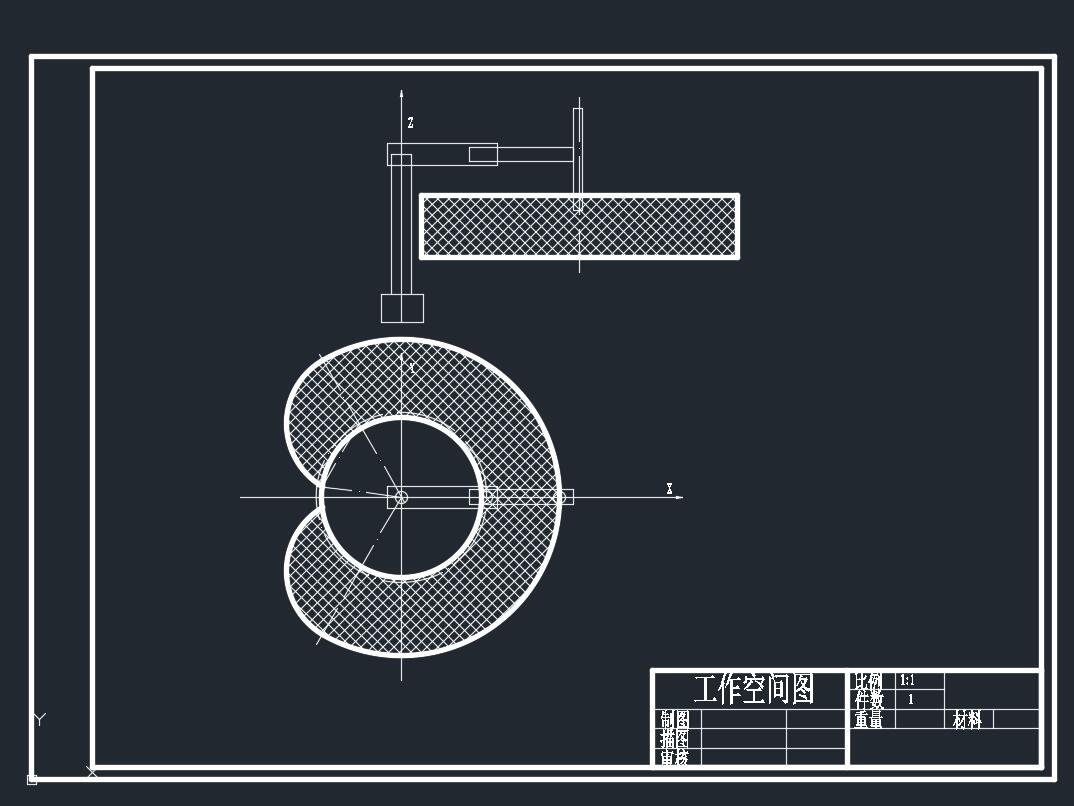
平面关节型机械手作为工业自动化领域的重要执行单元,其设计核心在于通过模块化结构实现多自由度精准操作。这类机械手通常由底座、旋转关节、连杆机构及末端执行器构成,通过平面内两个方向的旋转与平移组合,可完成物料搬运、装配定位等基础任务。其结构特点在于关节轴线相互平行,运动轨迹集中于单一平面,这种设计显著降低了控制复杂度,同时提升了重复定位精度,尤其适用于电子制造、食品包装等对空间布局要求严格的场景。
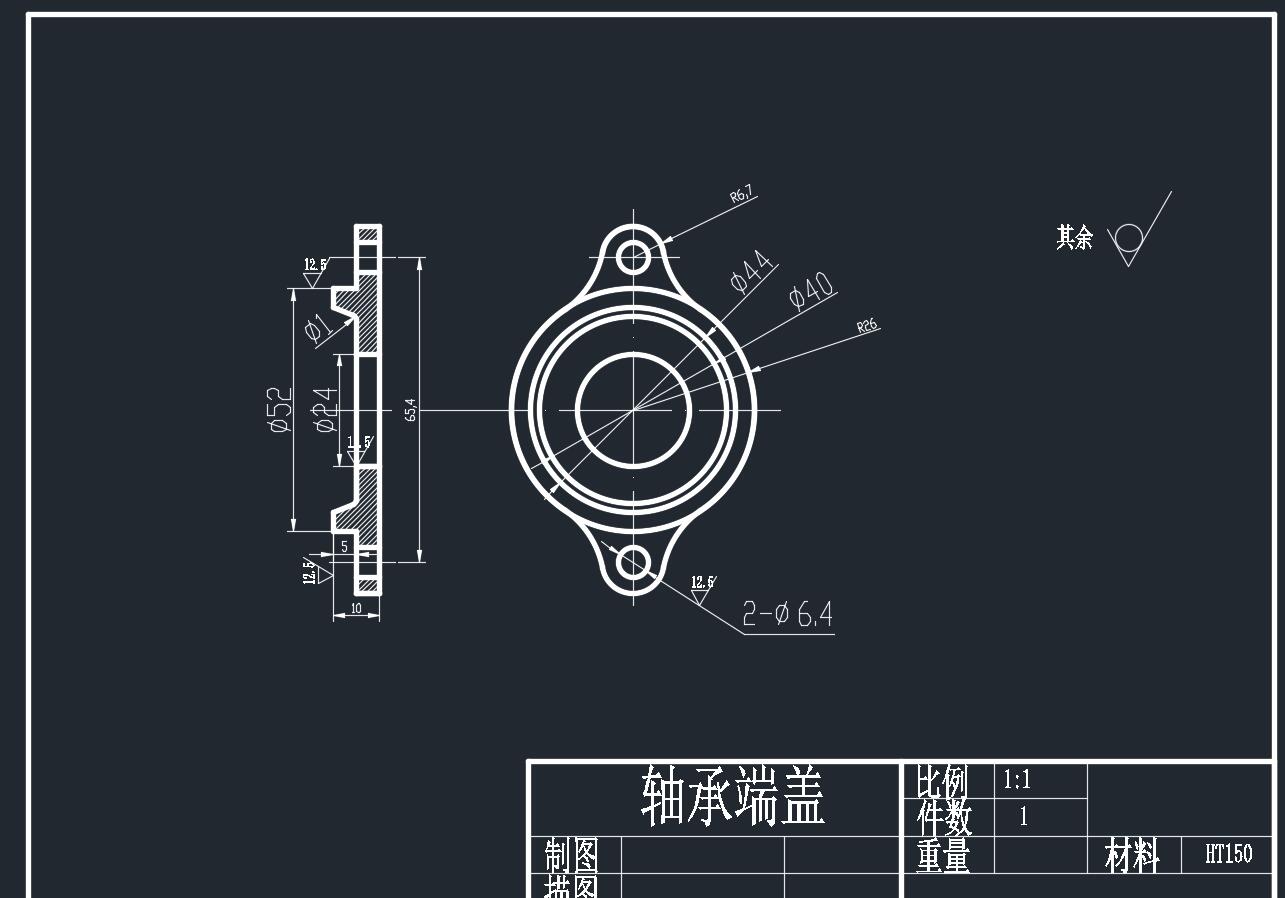
机械手的关键设计环节涵盖运动学分析与结构优化。运动学层面需通过D-H参数法建立坐标系模型,明确各关节角度与末端位姿的映射关系,为轨迹规划提供理论依据;结构优化则聚焦于连杆长度比例、关节驱动方式及材料选型,例如采用铝合金材质可减轻整体重量,而谐波减速器的应用则能平衡扭矩输出与体积限制。此外,末端执行器的设计需匹配具体作业需求,气动夹爪适用于规则物体抓取,真空吸盘则更擅长处理薄片类工件。
在控制策略方面,平面关节型机械手多采用开环控制与闭环反馈结合的方式。开环控制通过预设指令驱动关节运动,适用于固定路径作业;闭环反馈则依赖编码器或视觉传感器实时修正位置偏差,确保动态环境下的操作稳定性。这种分层控制架构既保证了基础任务的执行效率,又为复杂场景下的自适应调整预留了技术接口。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
10立方米储气罐
03/03
52
LS型螺旋输送机设计
02/07
57
机械手设计(论文+CAD图纸+开题报告+液压系统图+PLC接线图)
02/15
66
普通带式输送机的设计论文
04/01
33
健身球检验分类机 cad图及说明书 课程设计
02/11
65
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn