2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
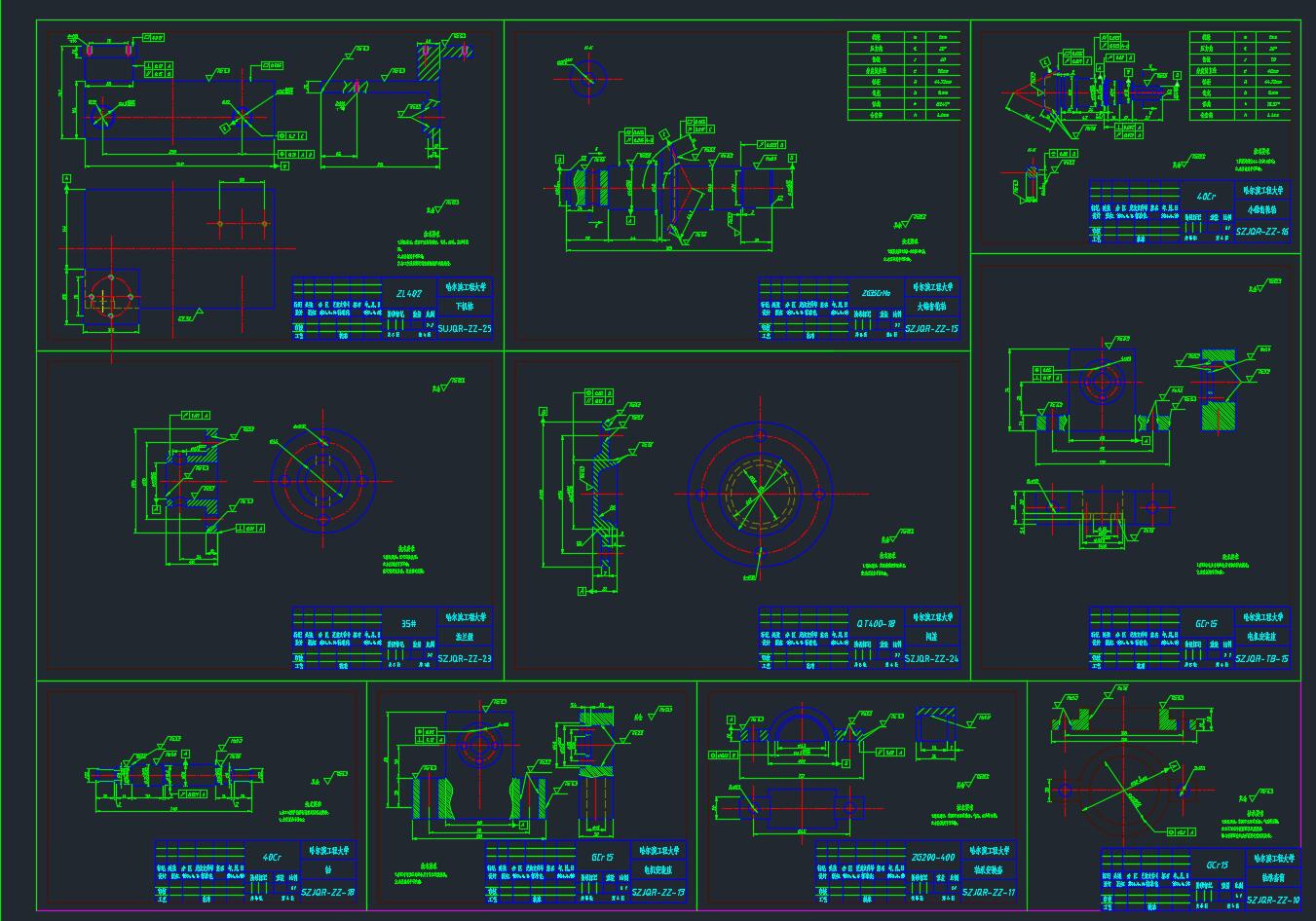
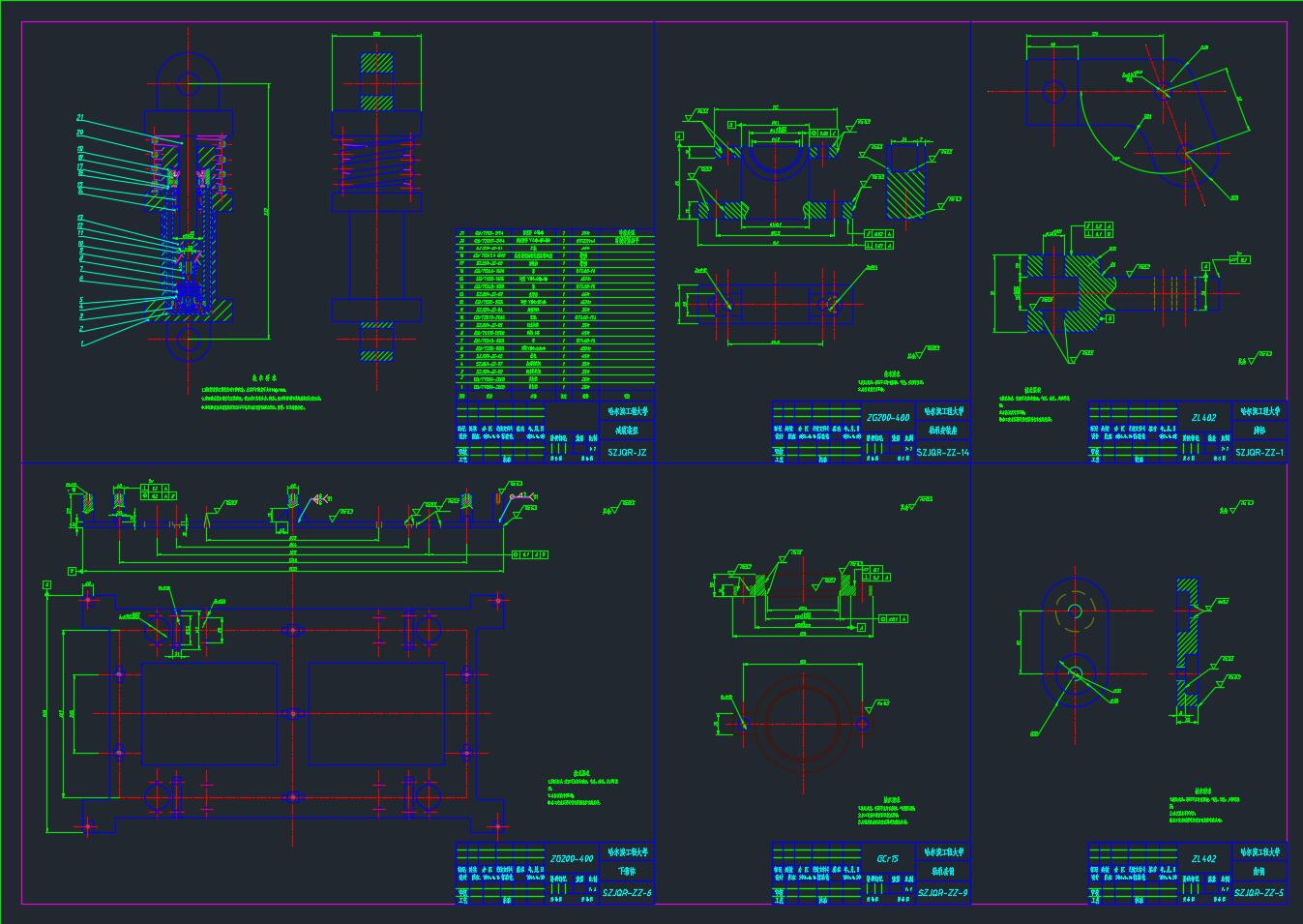
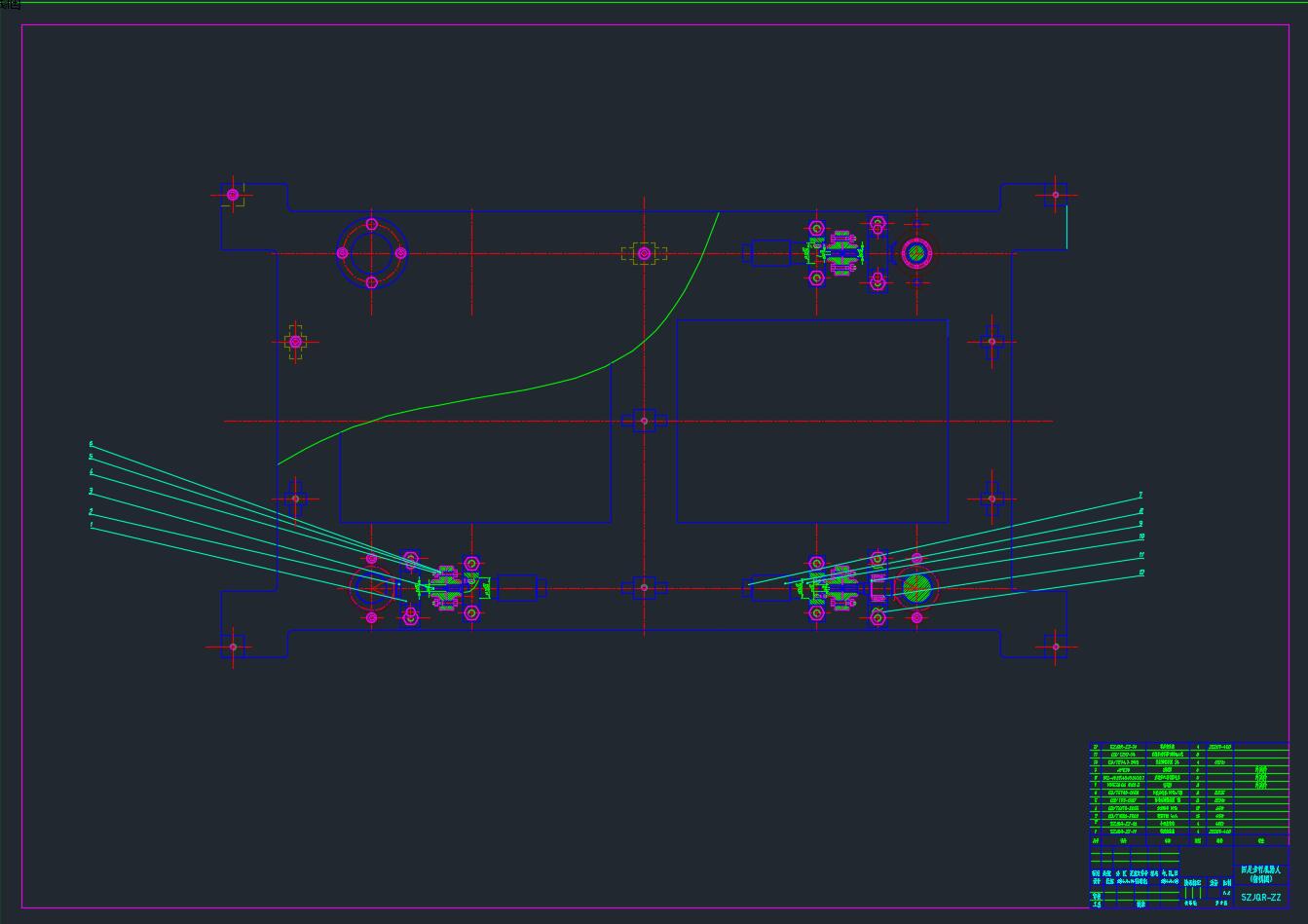
四足步行机器人的设计(论文+CAD图纸)
来源: 阅读:50
网站管理员
发布于 2026-04-01 03:45
查看主页
四足步行机器人作为仿生机械领域的重要研究方向,其设计融合了机械结构、运动控制与稳定性分析等多学科知识。这类机器人通过模拟四足动物的行走方式,能够在复杂地形中保持较高的移动效率,尤其适用于救援、勘探等需要灵活穿越障碍的场景。其核心作用在于通过合理的机械布局与运动协调,实现稳定、高效的步态,同时降低对单一支撑点的依赖,提升整体抗干扰能力。
机械结构设计是四足步行机器人的基础。腿部结构通常采用连杆机构或旋转关节组合,通过优化关节角度与连杆长度,确保每一步的支撑力分布均匀。躯干部分需兼顾强度与轻量化,避免因自重过大影响运动灵活性。材料选择上,铝合金或碳纤维复合材料因兼具刚性与轻便特性,成为常见选项。合理的结构设计不仅能提升机器人的负载能力,还能显著缩短调试周期,降低后期维护成本。
运动协调与步态规划是设计的关键环节。四足机器人的步态分为静态步行与动态步行:前者通过保持至少三足着地实现稳定,适用于低速场景;后者则通过快速切换支撑点提升速度,但对控制精度要求更高。设计时需通过数学建模分析关节运动轨迹,确保各腿动作同步,避免因相位差导致失衡。此外,步态的适应性调整也是重点,例如根据地形坡度自动切换步态模式,可进一步提升环境适应能力。
稳定性分析贯穿设计全过程。通过建立力学模型,计算不同步态下的重心偏移量与支撑多边形面积,可量化评估机器人的抗倾覆能力。针对可能出现的侧翻风险,可在腿部末端增加可伸缩的辅助支撑结构,或在躯干两侧设计防倾倒配重。这些措施能有效提升机器人在非结构化环境中的可靠性,减少因意外碰撞导致的故障率。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
双搅拌轴搅拌摩擦焊焊机设计【任务书+开题报告+论文+Creo三维+23张CAD图纸+文献综述报告】
03/13
42
数控车床自动回转刀架结构设计-课程设计
01/04
62
B3B4皮带轮CAD图纸
03/06
44
某基督教堂建筑楼施工组织设计及报价(含10张CAD图、施工总平图)
02/07
61
PFC1214 反击式破碎机(全套CAD图纸)
01/25
65
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn