轮式移动机器人作为自动化领域的重要载体,其设计需兼顾机械结构、运动控制与任务适配性。核心设计目标在于通过合理的轮系布局与驱动配置,实现稳定、灵活的移动能力,同时满足特定场景下的功能需求。例如,采用差速驱动结构的机器人可通过调整两侧轮速实现转向,而全向轮设计则能支持横向移动,显著提升复杂环境下的机动性。机械结构的优化需重点考虑重心分布、传动效率与零件强度,确保在承载任务载荷时仍能保持运动平稳性。
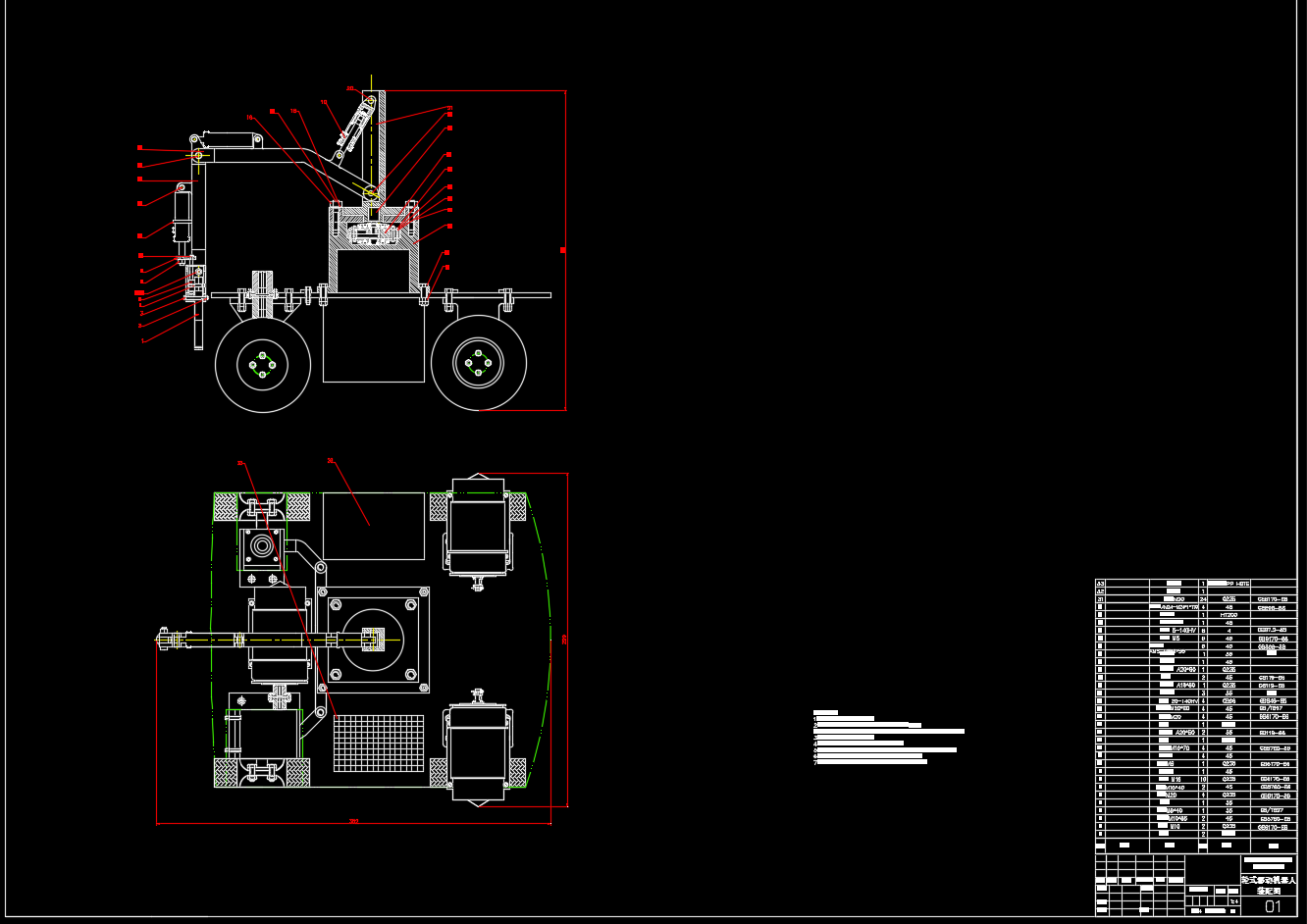
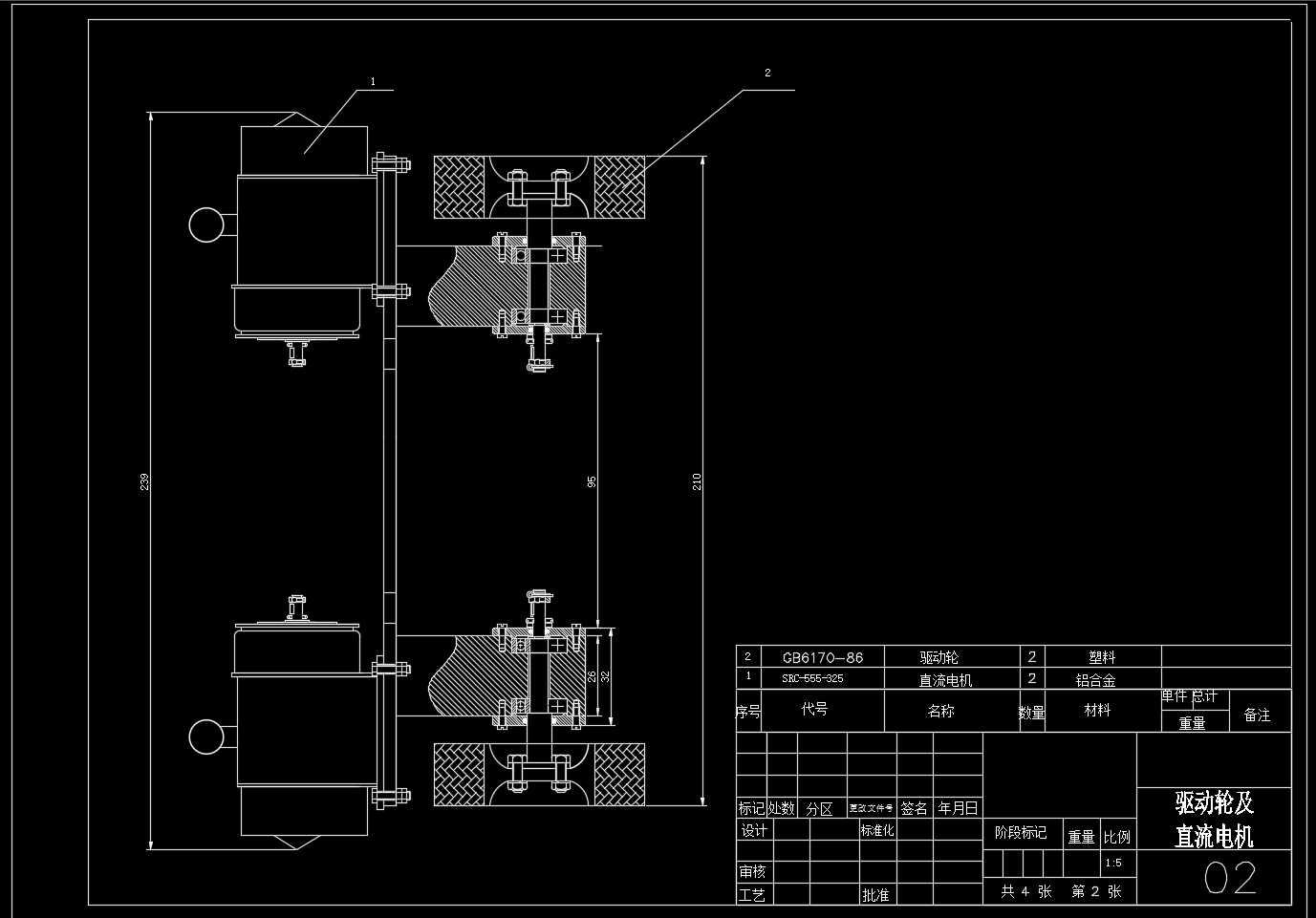
设计过程中,CAD图纸的绘制是关键环节。通过三维建模软件,可精确构建机器人的机械框架、轮系组件与连接部件,直观呈现各零件的装配关系与空间布局。图纸中需详细标注尺寸公差、材料选型与表面处理要求,为后续加工与组装提供明确指导。例如,轮毂与电机的连接方式、底盘的减震结构设计等,均需通过图纸反复验证其可行性,避免因设计疏漏导致实际运行中的故障。
开题报告与任务书则从研究层面明确设计方向。开题报告需梳理轮式机器人的应用背景与技术现状,分析现有方案的局限性,进而提出创新点与改进思路。任务书则需细化设计流程,将整体目标拆解为机械设计、控制系统开发、功能测试等阶段,并设定各阶段的交付成果与验收标准。例如,机械设计阶段需完成结构仿真与轻量化优化,控制系统开发需实现基础运动算法与传感器数据融合。
翻译部分通常涉及技术文档或前沿论文的转化,旨在引入国际先进设计理念。例如,国外学者提出的模块化轮式机器人架构,通过标准化接口实现功能扩展,可为本设计提供参考。翻译时需确保术语准确,避免因语言差异导致技术理解偏差。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。