2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
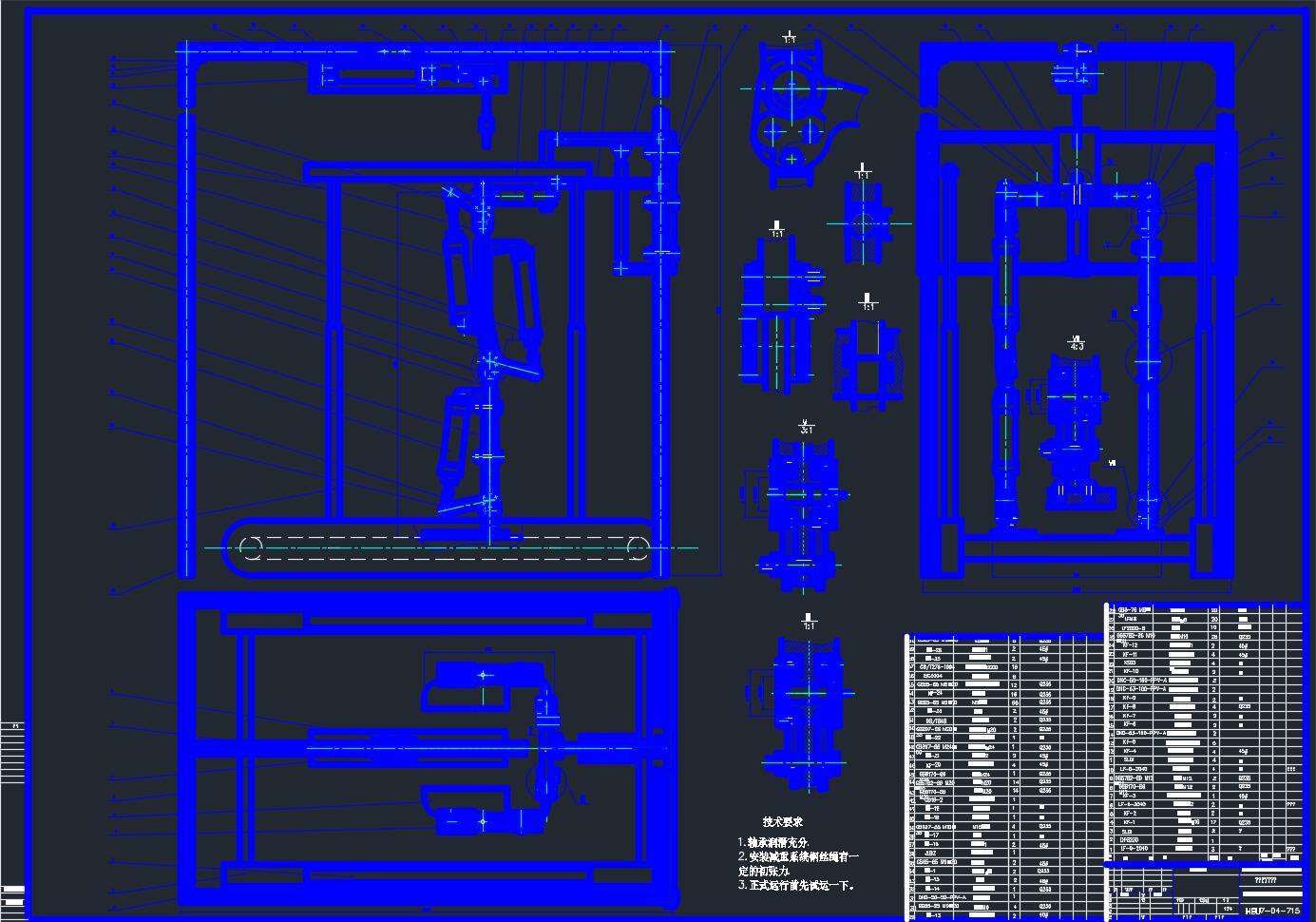
康复机器人的系统设计
来源: 阅读:38
网站管理员
发布于 2026-03-30 15:45
查看主页
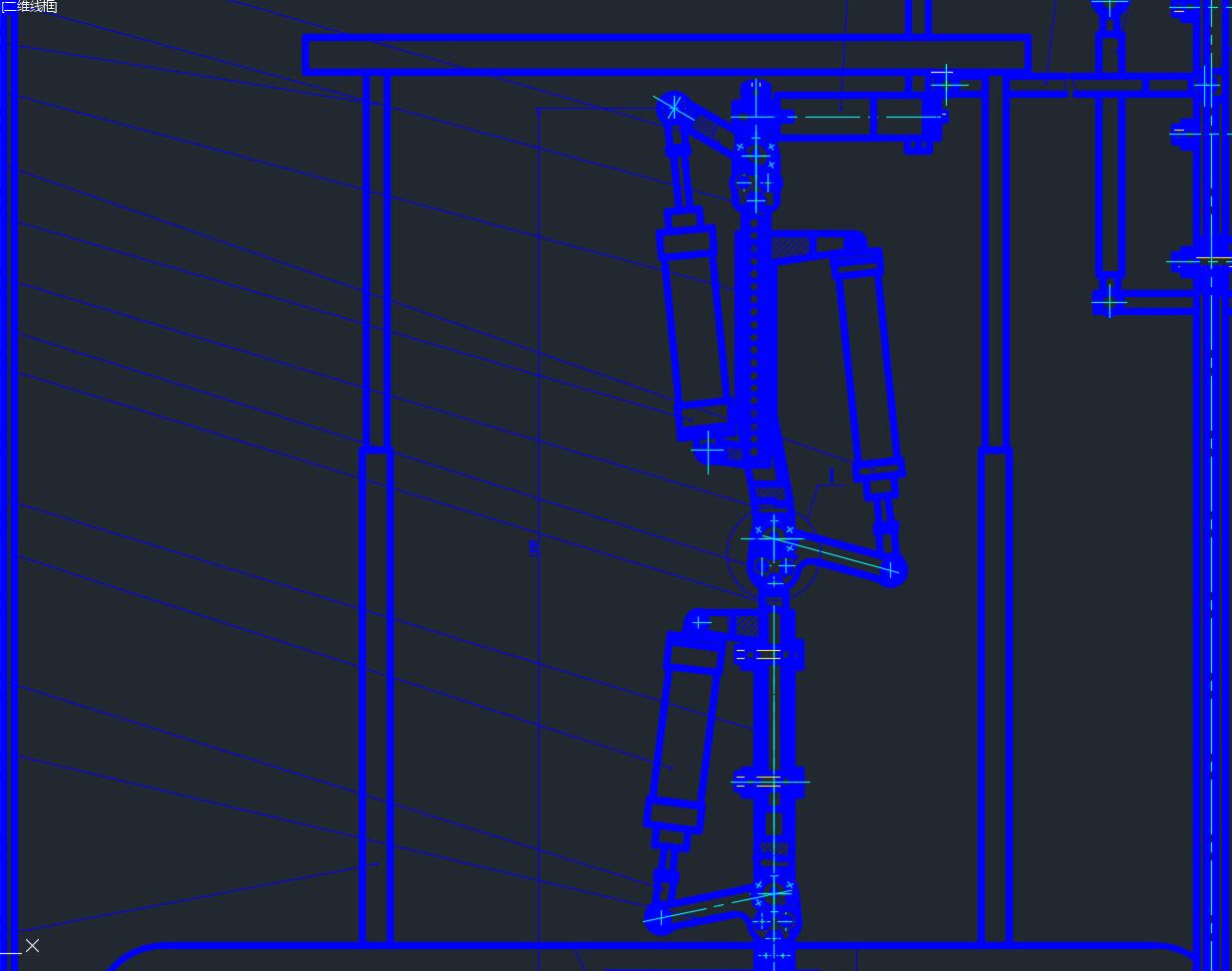
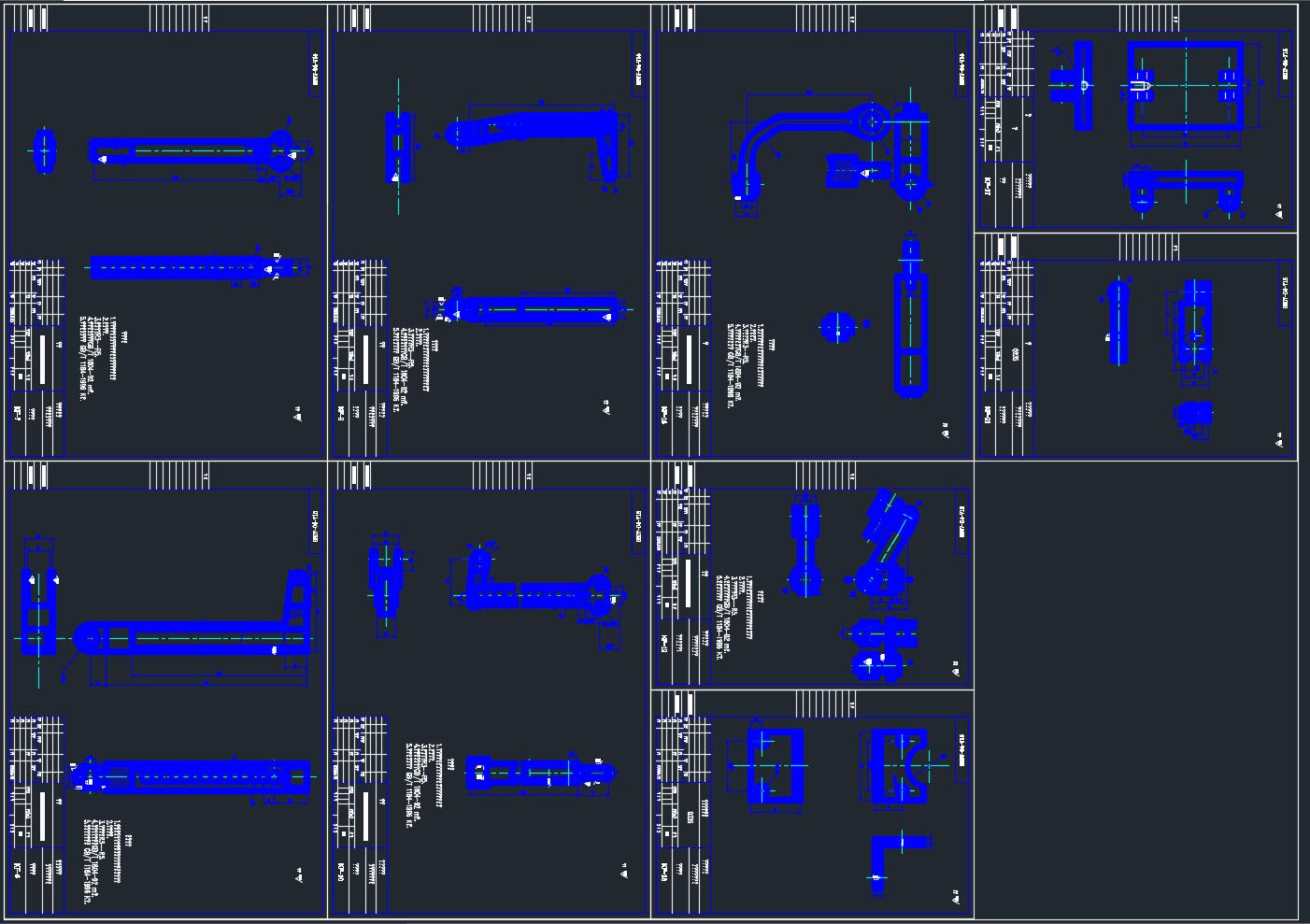
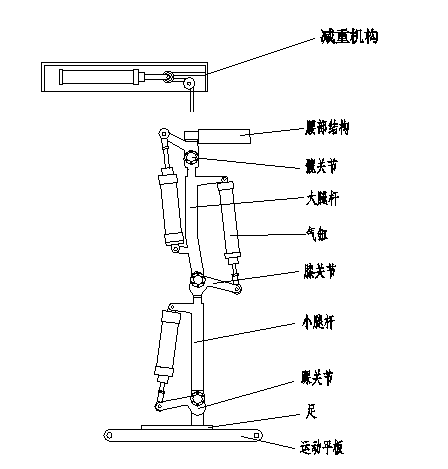
康复机器人的系统设计以提升患者功能恢复效率为核心目标,通过多学科交叉融合实现精准干预。其核心作用体现在三个层面:首先,通过机械结构与人体生物力学的深度适配,为患者提供稳定、可调节的支撑与运动辅助。例如,下肢康复机器人采用仿生关节设计,结合柔性驱动模块,既能模拟自然步态轨迹,又能根据患者肌力变化动态调整助力强度,避免传统康复训练中因人工操作误差导致的二次损伤。其次,系统集成多模态传感器网络,实时采集关节角度、肌电信号、步态周期等关键数据,为康复方案调整提供量化依据。这种数据驱动的闭环控制模式,显著提升了训练的个性化程度与效果可追溯性。
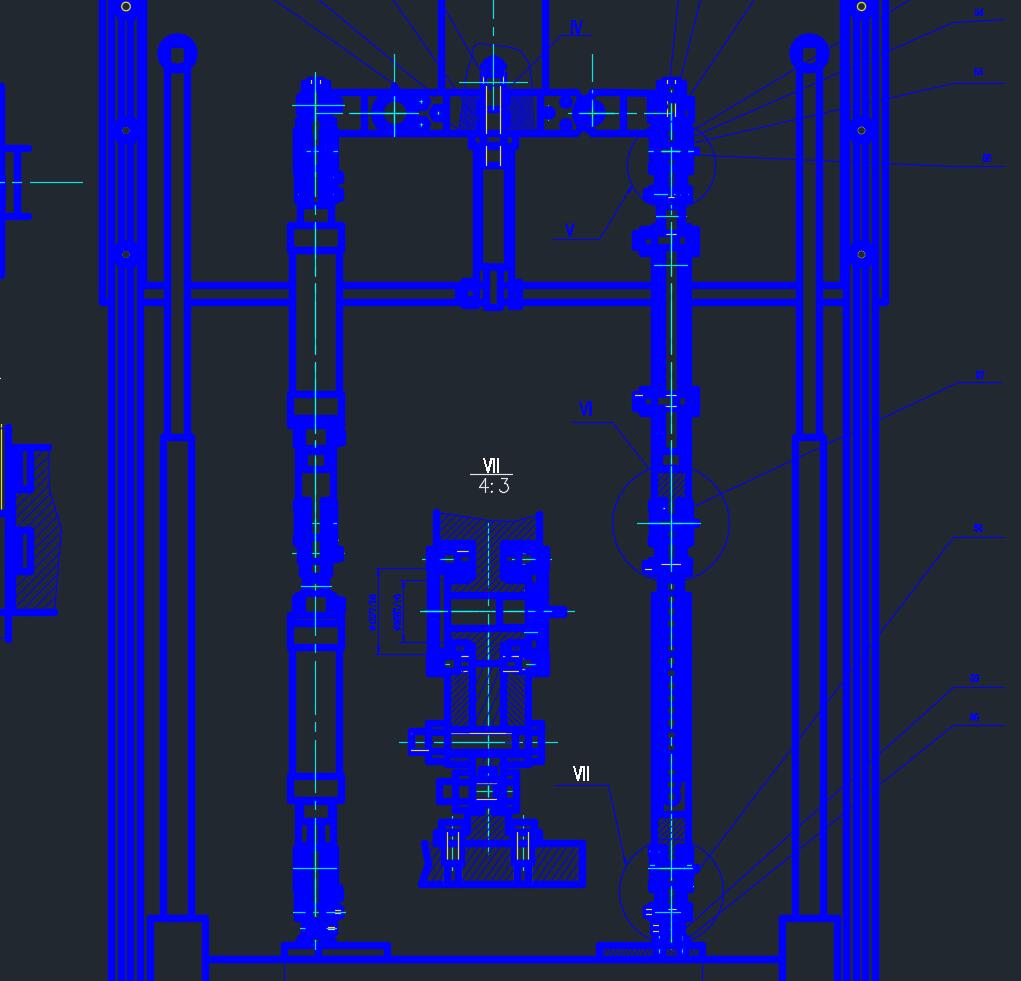
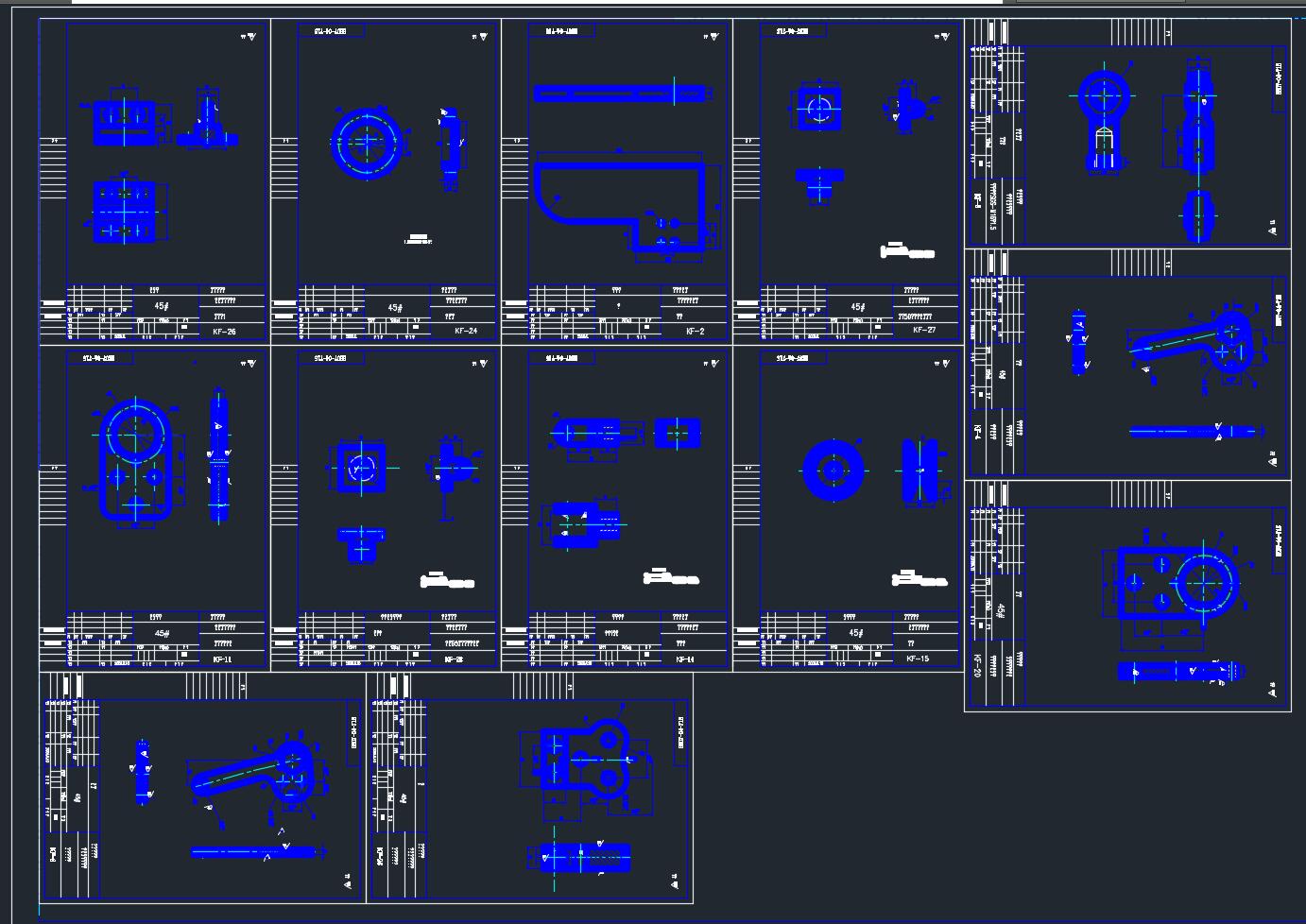
在功能模块划分上,康复机器人系统通常包含驱动单元、感知单元与控制单元三大基础架构。驱动单元采用轻量化材料与低摩擦传动机构,确保运动输出的平滑性与响应速度;感知单元则通过惯性测量单元(IMU)、力传感器等设备,构建覆盖运动学与动力学的多维监测体系;控制单元基于嵌入式系统架构,融合模糊控制、自适应算法等智能策略,实现助力与阻力的动态平衡。例如,上肢康复机器人通过分析患者抓握力与关节活动范围,自动调整训练难度,既避免过度负荷,又防止训练强度不足。这种模块化设计不仅提升了系统的可扩展性,也为后续功能升级预留了技术接口。
人机交互设计是康复机器人系统设计的关键环节,直接影响患者的使用体验与康复依从性。系统通过可视化界面与语音反馈机制,将训练数据转化为直观的进度报告,帮助患者建立康复信心;同时,采用生物反馈技术,将肌电信号转化为实时视觉提示,引导患者主动参与训练过程。例如,手部康复机器人通过LED灯带显示手指屈伸力度,配合触觉振动反馈,使患者能够直观感知动作准确性。这种交互模式不仅提升了训练的趣味性,更通过强化神经肌肉控制,加速运动功能重建。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
CA6140型普通车床数控化改造
01/29
56
谐波齿轮减速器CAD图纸
03/04
65
200L消泡流程图(CAD)
03/22
65
摇臂轴座 机械制造技术基础课程设计说明书(内含工序卡,但是不包含CAD图纸)
12/31
70
搅拌器的设计(论文+DWG图纸)
01/08
68
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn