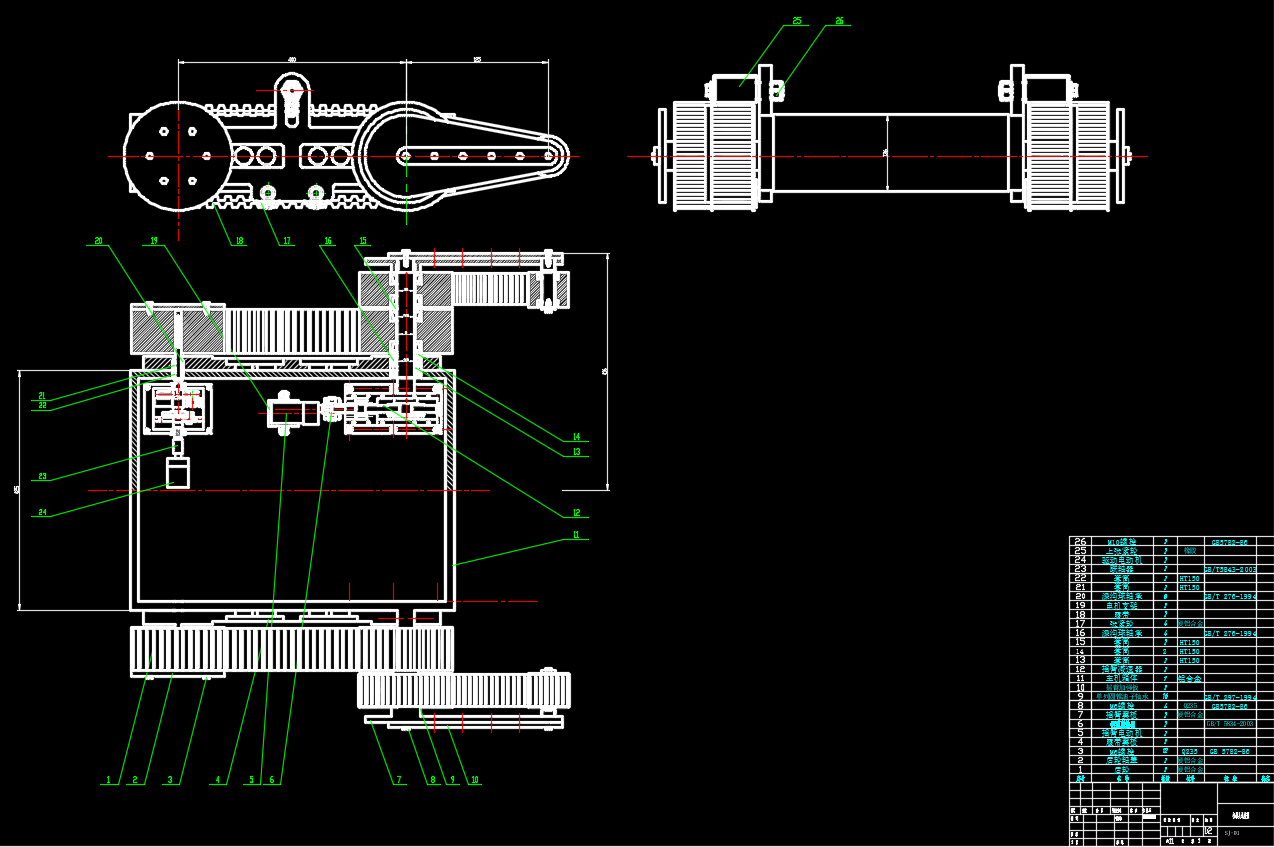
履带式搜救机器人作为特种救援场景中的关键装备,其机械结构设计需兼顾复杂地形适应性、负载能力与可靠性。该设计以模块化架构为核心,通过履带与轮系的协同布局实现多地形覆盖:履带采用高强度复合材料,表面设计梯形防滑纹路,可有效提升泥泞、碎石等松软地面的抓地力;轮系部分通过独立悬挂系统分散冲击载荷,避免单一结构过载损坏。这种设计既保证了机器人在废墟、山地等非结构化环境中的通过性,又通过轻量化设计将整机重量控制在合理范围内,显著降低能耗并延长续航时间。
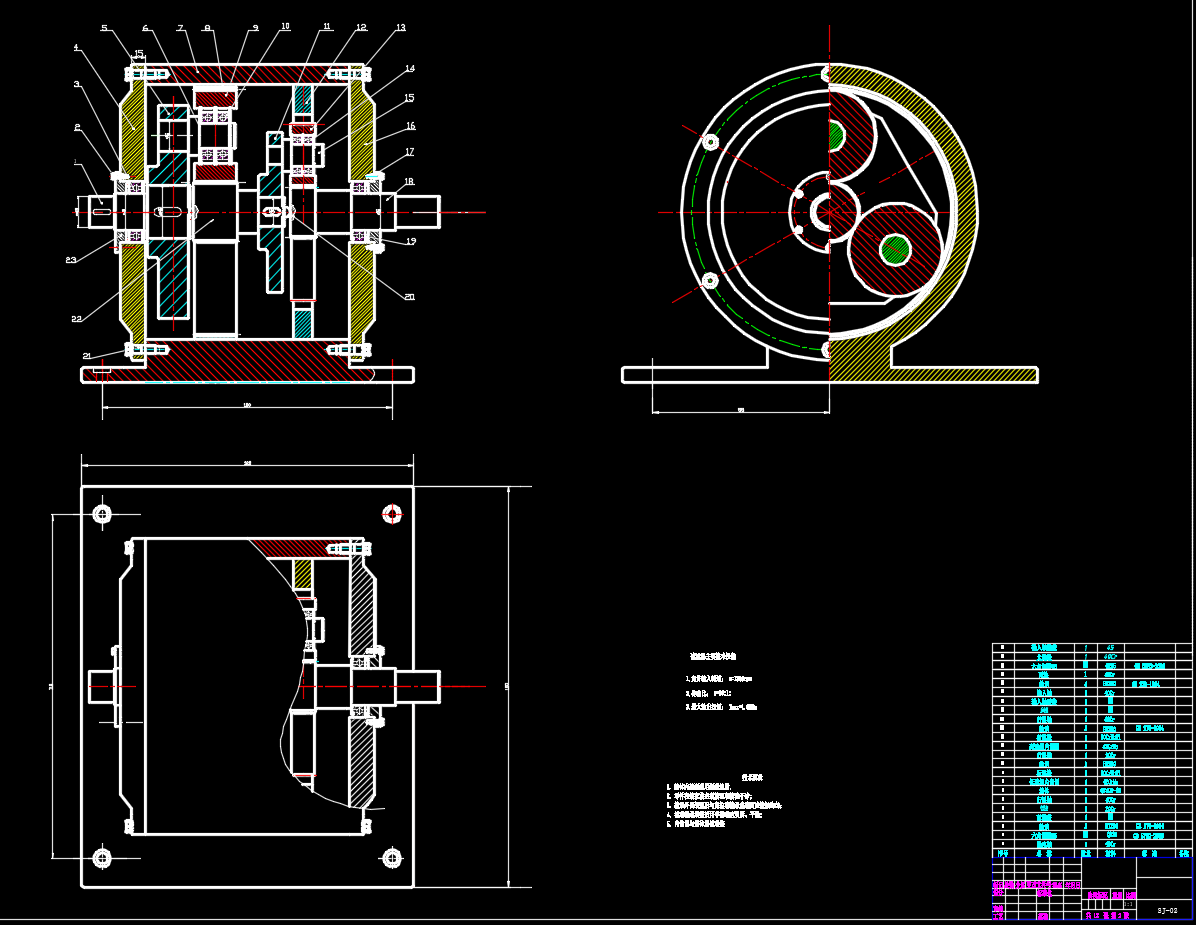
机械结构的可靠性直接决定搜救任务的执行效率。主体框架采用一体化铸造工艺,关键连接部位应用高精度定位销与螺栓复合固定,避免振动导致的松动;传动系统选用同步带与齿轮箱组合方案,同步带齿形与带轮槽型严格匹配,确保动力传输的稳定性;履带张紧机构采用弹簧-螺杆双调节结构,可根据地形变化实时调整履带松紧度,防止脱轨或过度磨损。这些设计细节通过有限元分析与实物测试验证,确保机器人在连续高强度作业中仍能保持结构完整性。
为满足搜救场景的多样化需求,机械结构预留了大量功能扩展接口。顶部平台设计标准化安装孔位,可快速搭载机械臂、生命探测仪或照明模块;底部预留电池仓与传感器安装槽,支持不同容量电池组与红外、声波传感器的灵活配置;侧部设置快拆式防护板,既能抵御落石冲击,又可通过拆卸降低整机高度以适应狭窄空间。这种开放式的结构设计显著缩短了功能升级周期,用户可根据实际任务需求快速调整机器人配置,提升任务适配性。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。