2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
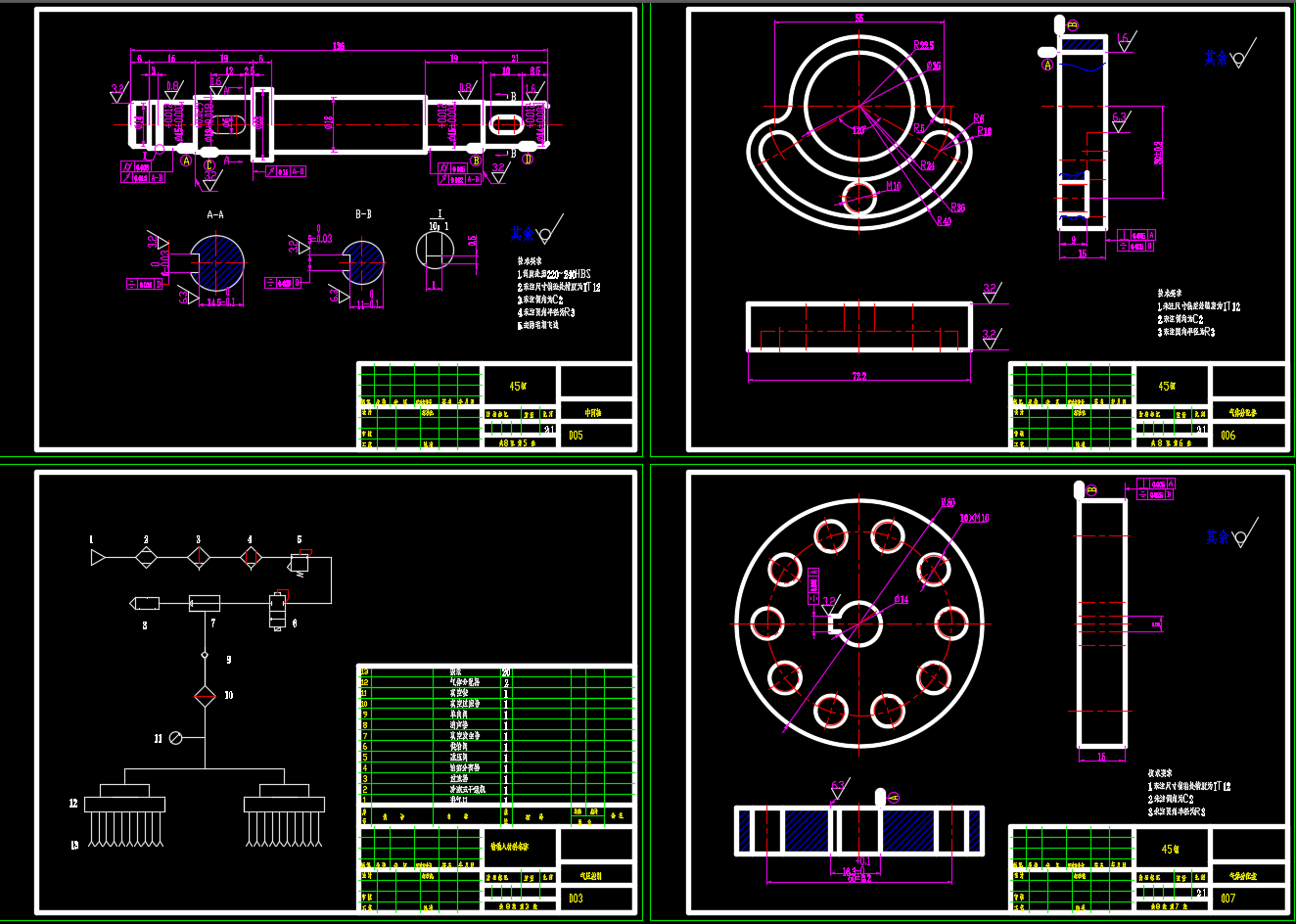
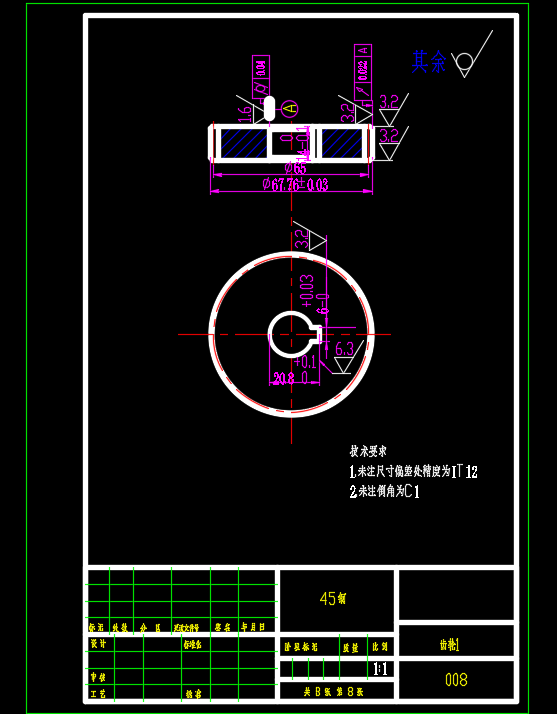
履带式吸附爬壁机器人设计 壁式清洗清洁机器人机械手(设计说明书+CAD图纸)
来源: 阅读:36
网站管理员
发布于 2026-03-30 12:30
查看主页
履带式吸附爬壁机器人作为高空清洁领域的核心装备,其设计聚焦于解决传统人工清洁效率低、安全性差等痛点。该机器人通过履带式移动机构与真空吸附系统的协同作用,可在玻璃幕墙、金属立面等光滑表面实现稳定攀爬。履带采用高强度复合材料,表面覆盖柔性橡胶层,既能适应不同曲率的壁面,又能通过形变增强吸附力;真空吸附系统通过分布式吸盘布局,确保机器人在移动过程中始终保持有效吸附,避免因局部漏气导致坠落风险。这种设计显著提升了清洁作业的自动化水平,尤其适用于高层建筑外立面的周期性维护。
壁式清洗清洁机器人的机械手是执行清洁任务的关键模块,其设计需兼顾灵活性与负载能力。机械手采用多关节串联结构,通过步进电机驱动各关节转动,实现末端执行器的三维空间定位。末端执行器集成高压喷水装置与旋转刷盘,可根据壁面污渍程度自动调节清洗力度:高压喷水用于溶解顽固污渍,旋转刷盘则通过高速摩擦去除表面附着物。此外,机械手配备视觉传感器,可实时识别壁面污渍分布,动态规划清洗路径,避免重复作业或遗漏区域,从而提升整体清洁效率。
在系统集成方面,履带式吸附机构与机械手通过模块化设计实现快速拆装,便于根据不同清洁场景调整配置。例如,针对弧形玻璃幕墙,可更换柔性履带以增强贴合度;针对粗糙石材墙面,则可替换硬质刷盘以提升清洁效果。这种设计显著缩短了设备适配周期,同时降低了维护成本。通过优化机械结构与控制算法,机器人整体重量控制在合理范围内,既保证了吸附稳定性,又避免了因自重过大导致的能耗增加。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
DY1000全液压岩心钻机液压动力头设计(含全套CAD图纸)论文 CAD图纸 开题报告 任务书……
02/07
71
富士康喷涂方案
03/22
50
桥面净宽为净7+2×1.0m二级公路35m预应力T梁桥(计算表格、CAD图纸)
01/26
62
圆锥破碎机图
01/12
61
线材510粗轧机设计(毕设含全套CAD图纸)
04/02
48
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn