2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
滚轮式脚踏式液压升降平台设计(论文CAD图纸 开题报告 任务书 英文翻译)
来源: 阅读:27
网站管理员
发布于 2026-03-29 23:30
查看主页
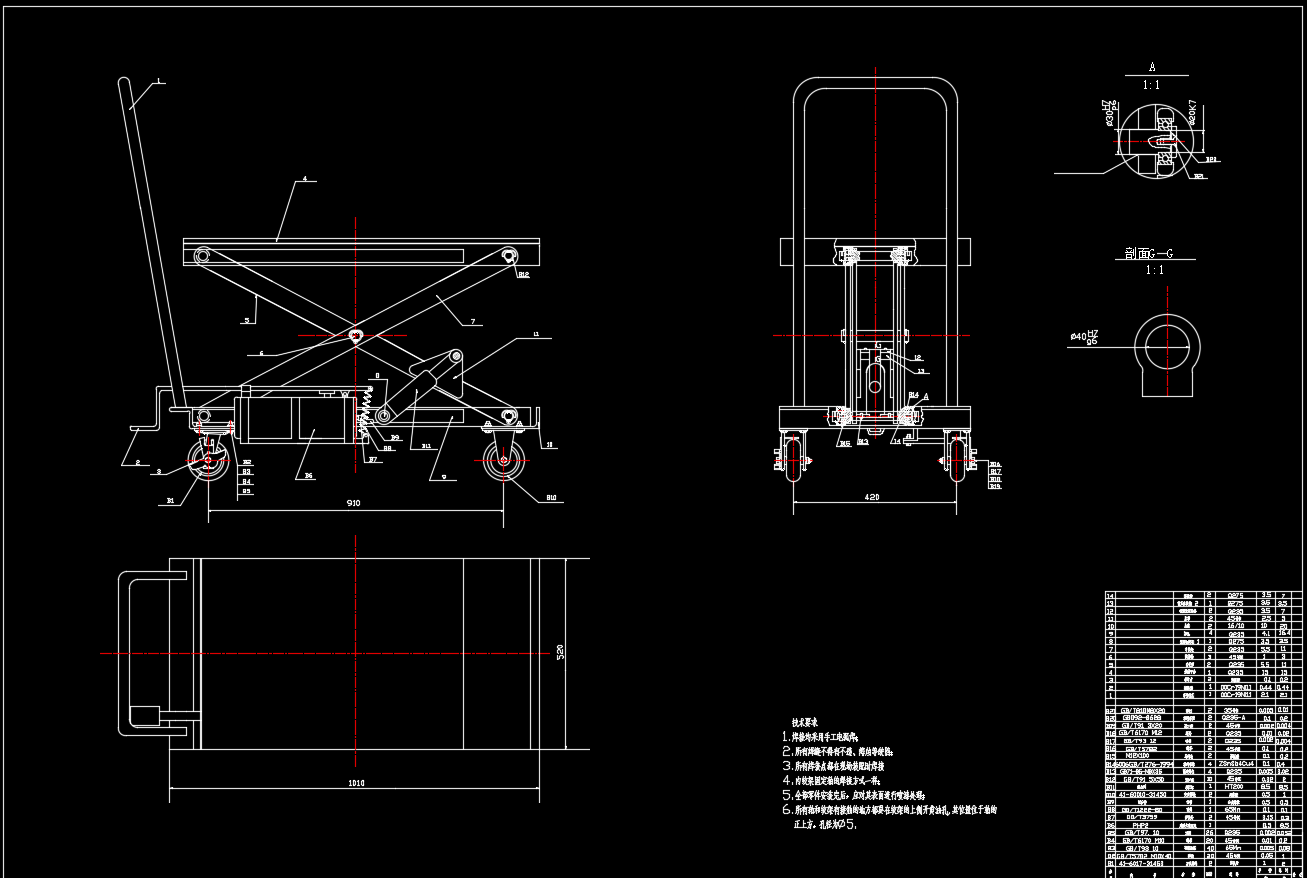
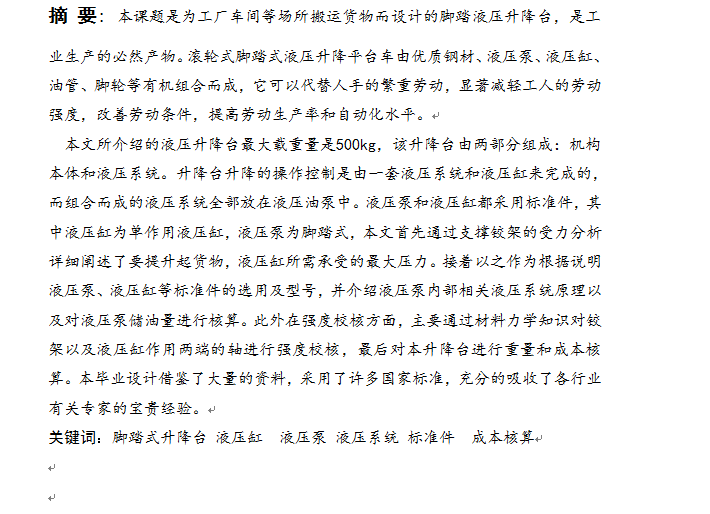
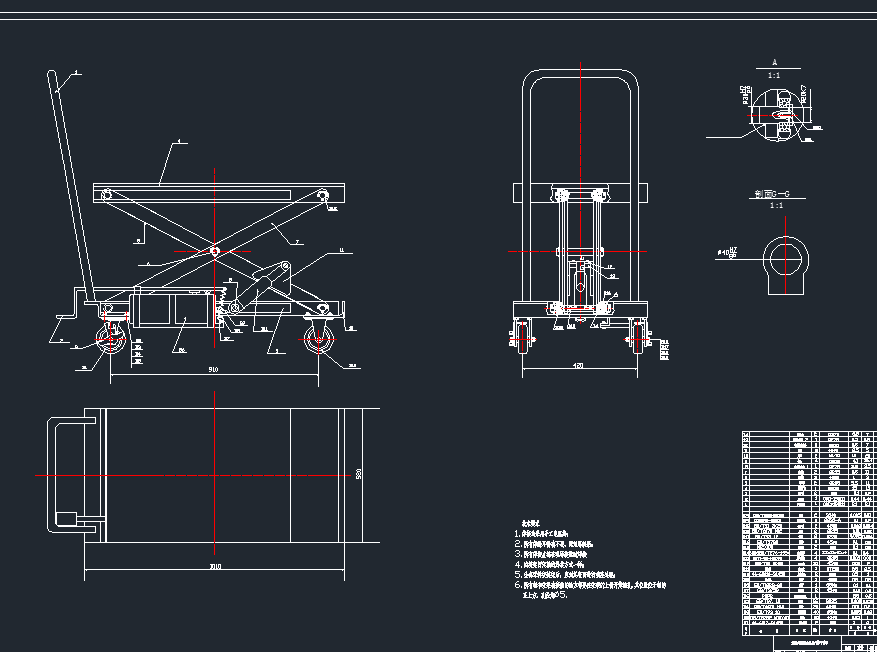
滚轮式脚踏式液压升降平台作为物料搬运与空间调整的关键设备,其核心作用在于通过机械与液压系统的协同,实现垂直方向的精准升降控制。该设备以脚踏驱动为动力源,通过滚轮结构与液压缸的联动,将人力输入转化为稳定、可控的液压输出,从而驱动平台升降。相较于传统电动或手动升降装置,其优势在于无需外部电源,适用于无电作业环境或临时性操作场景;同时,脚踏式设计通过机械杠杆原理显著降低操作力需求,提升人机交互效率,尤其适合需要频繁升降且负载适中的工业场景,如仓库货架存取、车间设备维护等。
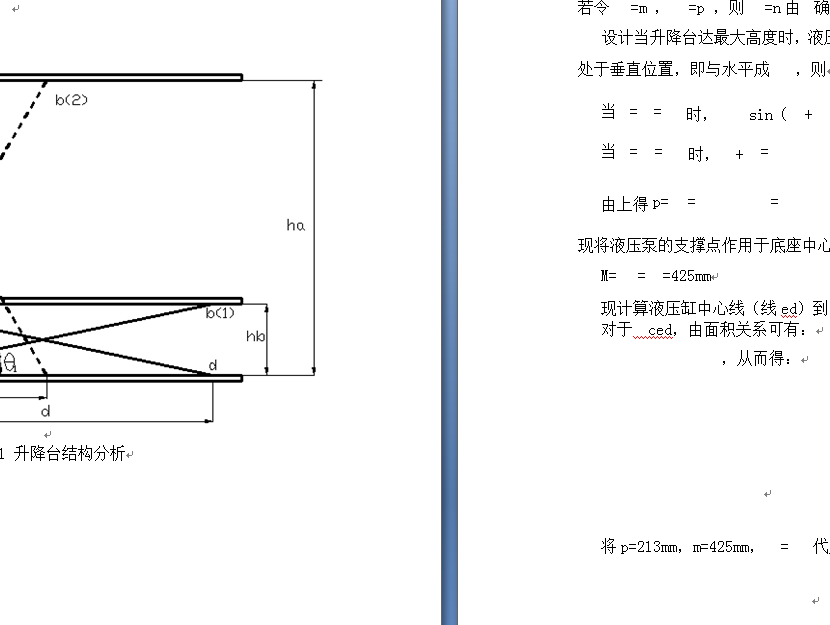
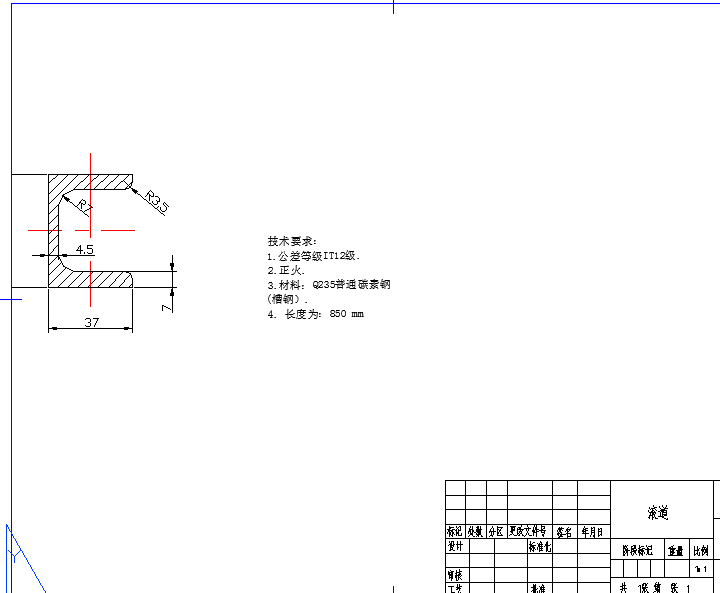
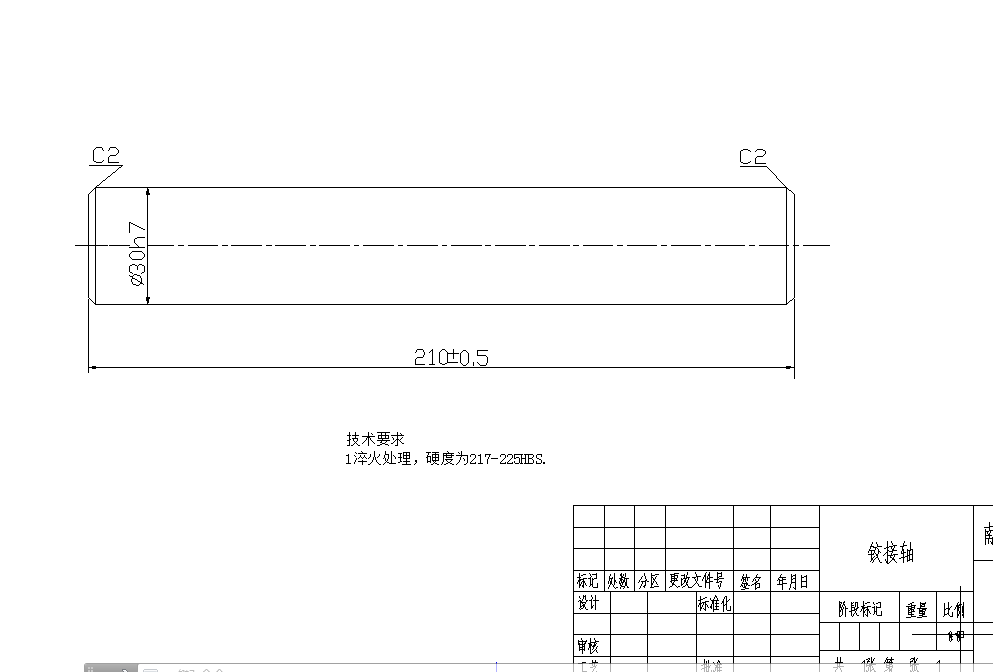
设计过程中需重点攻克三大技术模块:机械结构方面,滚轮的材质选择与布局直接影响平台升降的平稳性,需通过有限元分析优化轮体与导轨的接触应力分布;液压系统方面,需合理匹配液压缸行程、油管直径与单向阀响应速度,确保动力传递的连续性与响应灵敏度;安全机制方面,需集成超载保护装置与防坠落结构,例如在液压回路中设置溢流阀限制最大压力,在平台底部增设机械锁止机构防止意外下滑。这些模块的协同设计,可显著提升设备的可靠性与适用性,满足不同工况下的作业需求。
该设备的设计逻辑以“模块化”与“标准化”为原则,通过通用化零件降低制造成本,同时通过可调节结构适配不同升降高度需求。例如,液压缸与底座的连接采用可拆卸式设计,用户可根据实际工况更换不同行程的液压元件;滚轮组通过螺栓固定于导轨两侧,便于后期维护与更换。这种设计思路不仅缩短了开发周期,还为后续功能扩展(如增加电动辅助模块或智能控制接口)预留了技术接口,为设备的长期应用提供了灵活性。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
立式液压驱动数控滚弯机机械系统设计
03/30
33
组合专机-E52FM左曲轴箱双面钻专用机床设计
01/01
71
糖果枕式包装机总体设计及横封切断装置设计(设计说明书+8张CAD图纸)
02/06
63
传动轴突缘叉加工工艺及钻39孔夹具设计【机械制造课程设计CAD及说明书】
01/29
61
大学生方程式赛车设计(传动及最终传动系统设计)(论文+CAD图纸+三维图+开题报告+翻译)
01/31
58
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn