机械手作为自动化领域的关键执行装置,其设计过程需兼顾结构强度、运动精度与操作稳定性。核心设计环节涵盖机械臂的拓扑优化、传动系统的选型匹配以及末端执行器的功能适配。通过有限元分析验证关键部件的应力分布,可有效规避结构失效风险;结合运动学建模确定关节角度与末端位姿的映射关系,为轨迹规划提供理论支撑。此类系统性设计流程能够显著提升机械手的负载能力与重复定位精度,为后续的装配调试奠定可靠基础。
论文部分聚焦于机械手设计的理论框架构建,从机构学原理出发,系统阐述连杆参数计算、驱动元件选型及误差补偿策略。通过对比不同传动方案的优缺点,明确同步带与谐波减速器的组合优势,既保证了传动效率又降低了背隙误差。针对末端执行器的多样化需求,提出模块化设计思路,通过更换夹爪或吸盘组件即可适配不同工件的抓取场景。这些理论成果为实际设计提供了可量化的指导依据,使机械手能够满足复杂工况下的作业要求。
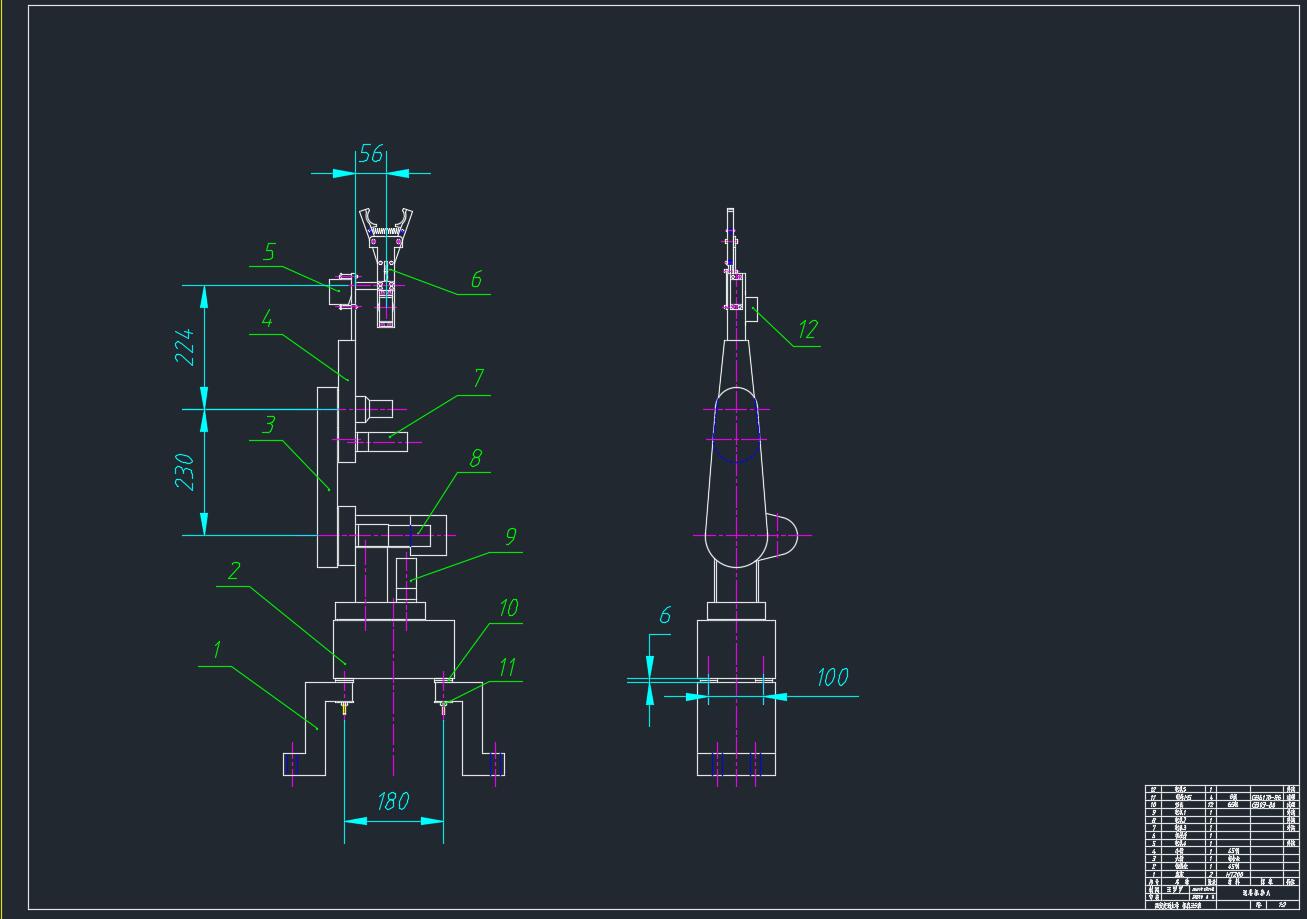
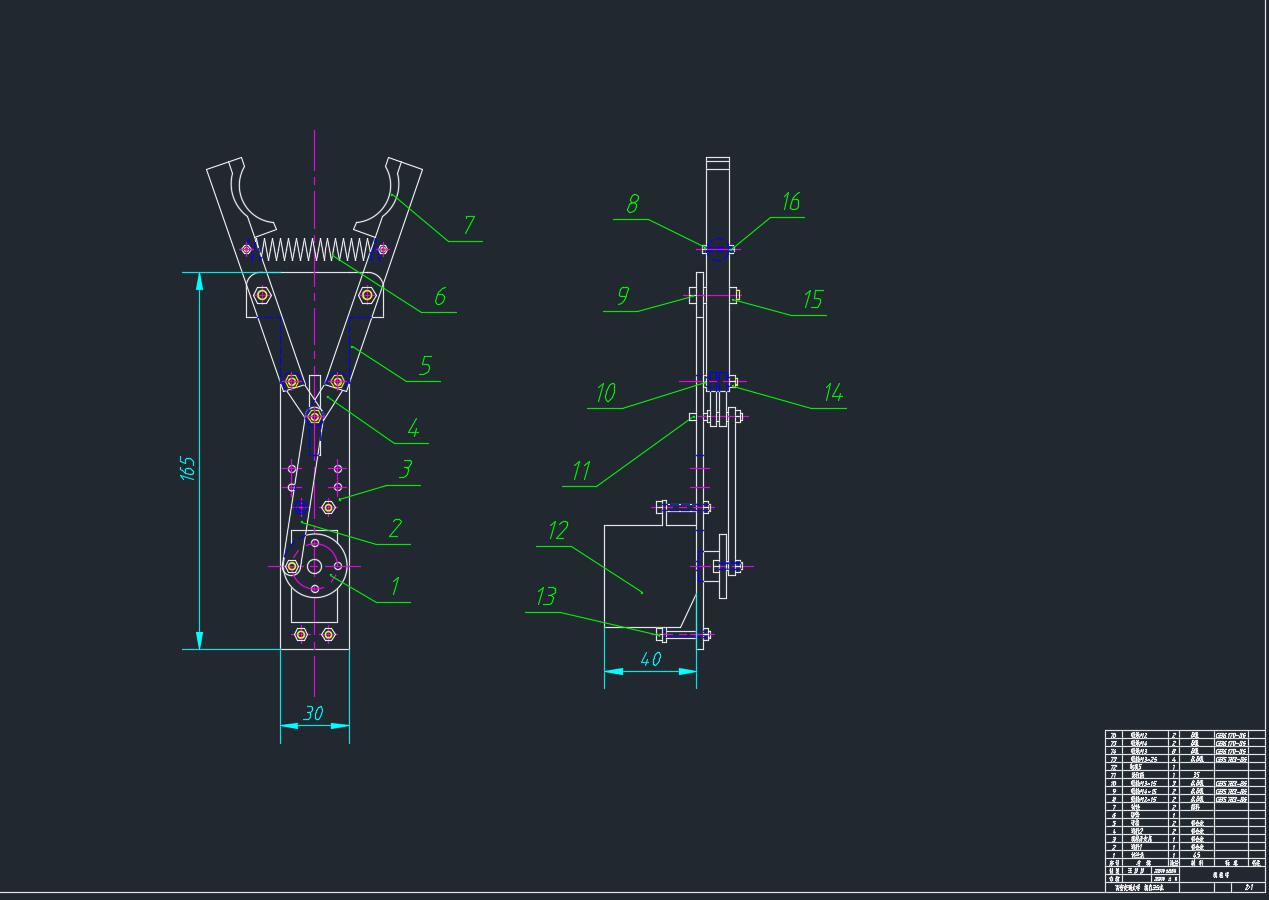
CAD图纸作为设计成果的直观呈现,包含总装图、部件图及零件图三个层级。总装图通过爆炸视图清晰展示各模块的装配关系,部件图则标注了关键尺寸公差与形位公差,确保加工精度符合设计要求。零件图中详细标注了材料热处理方式与表面处理工艺,例如铝合金部件采用阳极氧化提升耐腐蚀性,钢制零件通过淬火处理增强硬度。这些技术细节的规范表达,为后续的制造与检验环节提供了标准化依据。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。