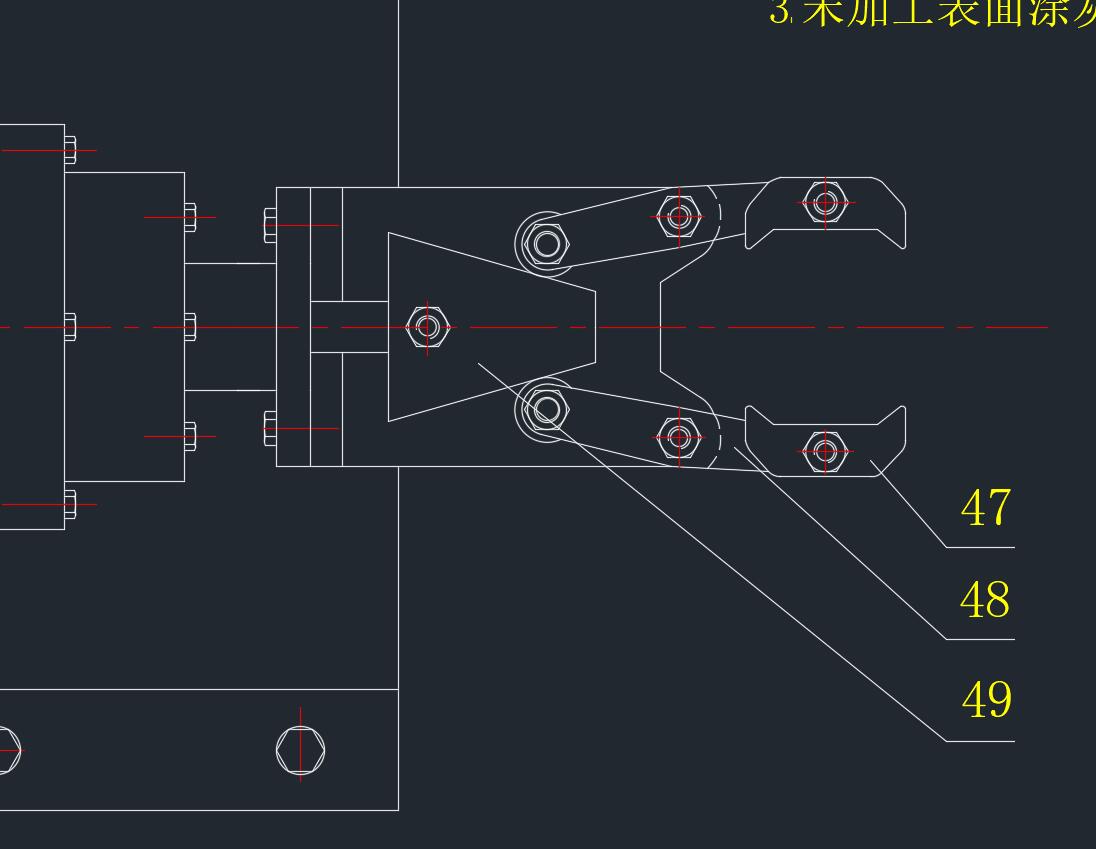
机械手夹持器作为工业自动化领域的核心执行部件,其设计质量直接影响机械手的作业精度与稳定性。其核心作用在于通过合理的结构设计实现工件的可靠抓取与释放,既要保证足够的夹持力以防止工件滑落,又需避免因夹持力过大导致工件表面损伤。在装配环节,夹持器的结构需与机械手本体、驱动系统等部件形成精准配合,例如通过定位销与螺栓实现模块化连接,确保各组件间的相对位置精度满足设计要求。此外,夹持器的材料选择需兼顾强度与耐磨性,常见方案包括采用高强度铝合金作为主体框架,关键接触面嵌入聚氨酯或橡胶等柔性材料以提升抓取适应性。
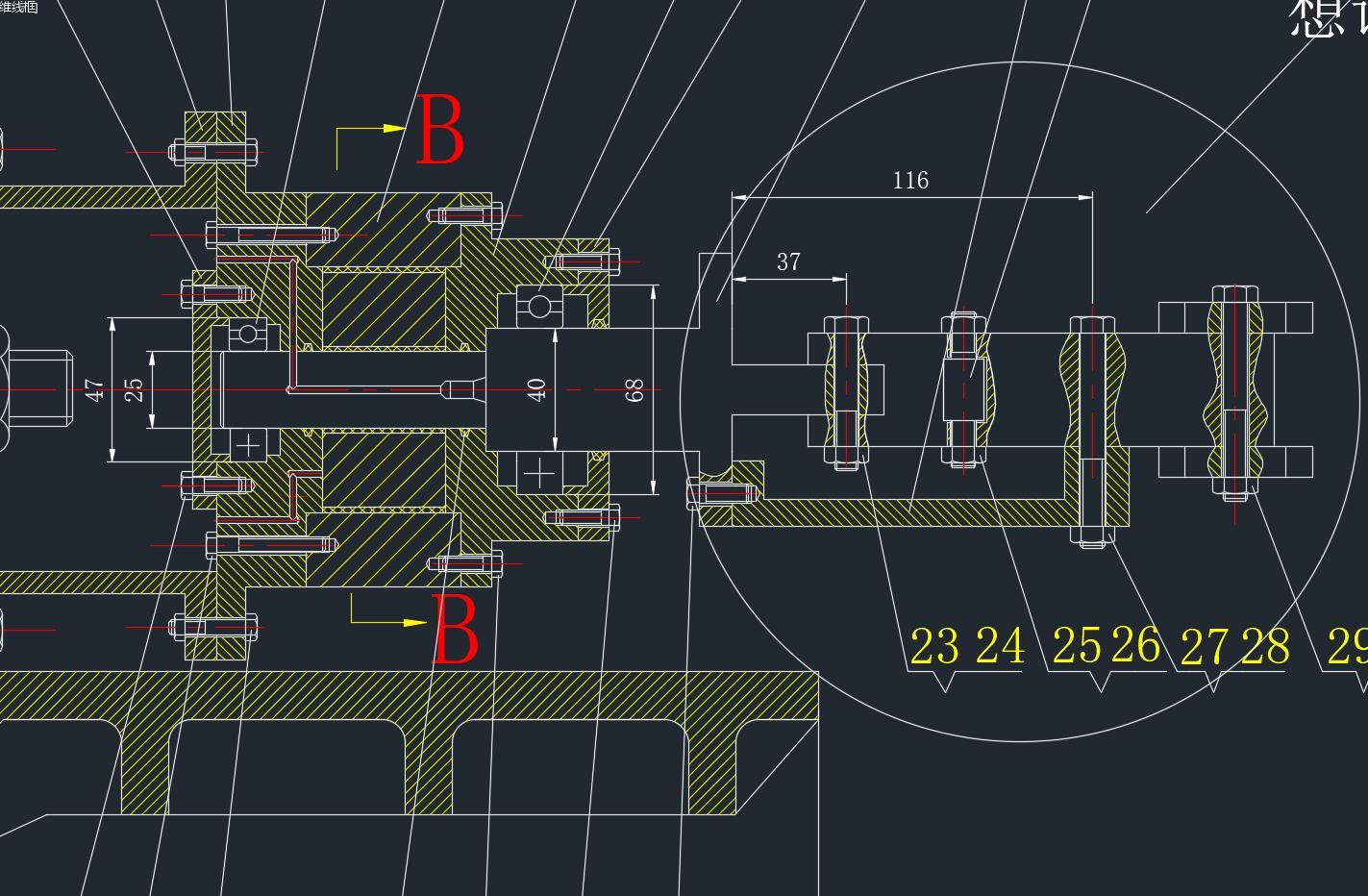
装配图是夹持器设计成果的关键呈现形式,其核心价值在于通过标准化图示语言清晰表达各零件的装配关系与运动逻辑。图中需标注关键尺寸链,如夹爪开合范围、驱动杆行程等,为后续调试提供基准;同时需明确零件间的配合类型,例如采用间隙配合实现夹爪的灵活摆动,过盈配合确保驱动轴与齿轮的可靠连接。通过分层绘制装配图,可直观展示从零件到组件再到整机的组装过程,帮助设计者快速定位装配难点,例如通过剖视图呈现内部齿轮传动机构的啮合状态,避免因空间布局不合理导致干涉问题。
在夹持器功能验证阶段,装配图与三维模型需形成互补验证体系。通过装配图可快速检查零件数量与规格是否符合设计清单,避免因漏装或错装导致返工;结合三维模型的干涉检查功能,可进一步验证各组件在极限工况下的运动协调性。例如,在模拟多爪同步抓取场景时,装配图可提供零件间的相对位置约束条件,而三维模型则通过动态仿真验证夹持力分布的均匀性。这种“图-模”协同验证方式显著缩短了设计迭代周期,为后续样机试制提供了可靠依据。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。