2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
机械手-工业机械手模型-基于PLC的控制系统软硬件设计(论文+CAD图纸+外文翻译+开题报告+文件综述……)
来源: 阅读:49
网站管理员
发布于 2026-03-29 05:00
查看主页
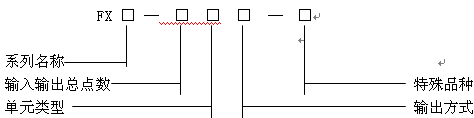
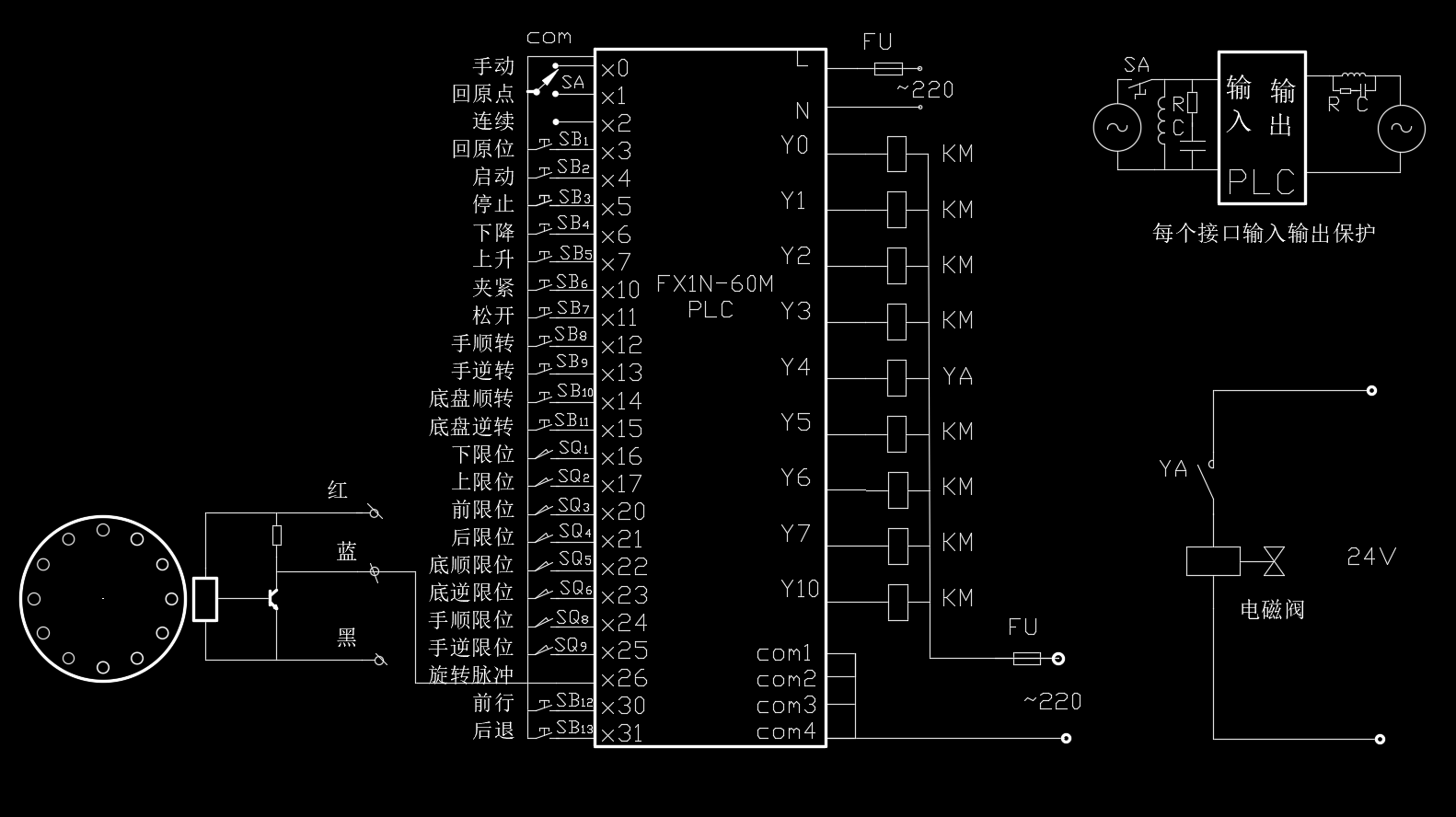
工业机械手作为现代制造领域的关键设备,其控制系统设计直接影响设备运行的稳定性与效率。基于PLC的控制系统通过可编程逻辑控制器实现机械手各关节的精准驱动与多轴协同,其核心作用在于将复杂的运动逻辑转化为可执行的数字信号,确保机械手在抓取、搬运、装配等环节中保持高重复定位精度。硬件设计需综合考虑输入输出模块的扩展性、伺服驱动器的响应速度以及传感器信号的抗干扰能力,例如通过模块化设计实现不同功能单元的灵活组合,以适应多样化作业场景的需求。软件层面则依托梯形图或结构化文本编程,将运动控制算法、安全保护逻辑与人机交互界面深度集成,使系统具备故障自诊断与参数动态调整能力。
控制系统设计需兼顾功能实现与工程可行性。硬件架构通常采用分层式结构,底层为信号采集与执行单元,中间层为PLC主控模块,顶层为上位机监控系统。各层间通过工业以太网或现场总线实现数据高速传输,确保实时性要求。软件设计遵循模块化原则,将运动控制、逻辑判断、通信协议等子程序独立封装,便于后期调试与功能扩展。例如,在路径规划模块中,通过插补算法生成平滑的运动轨迹,避免机械臂在高速运动时产生振动;在安全保护模块中,设置超程检测、急停响应等冗余机制,最大限度降低操作风险。
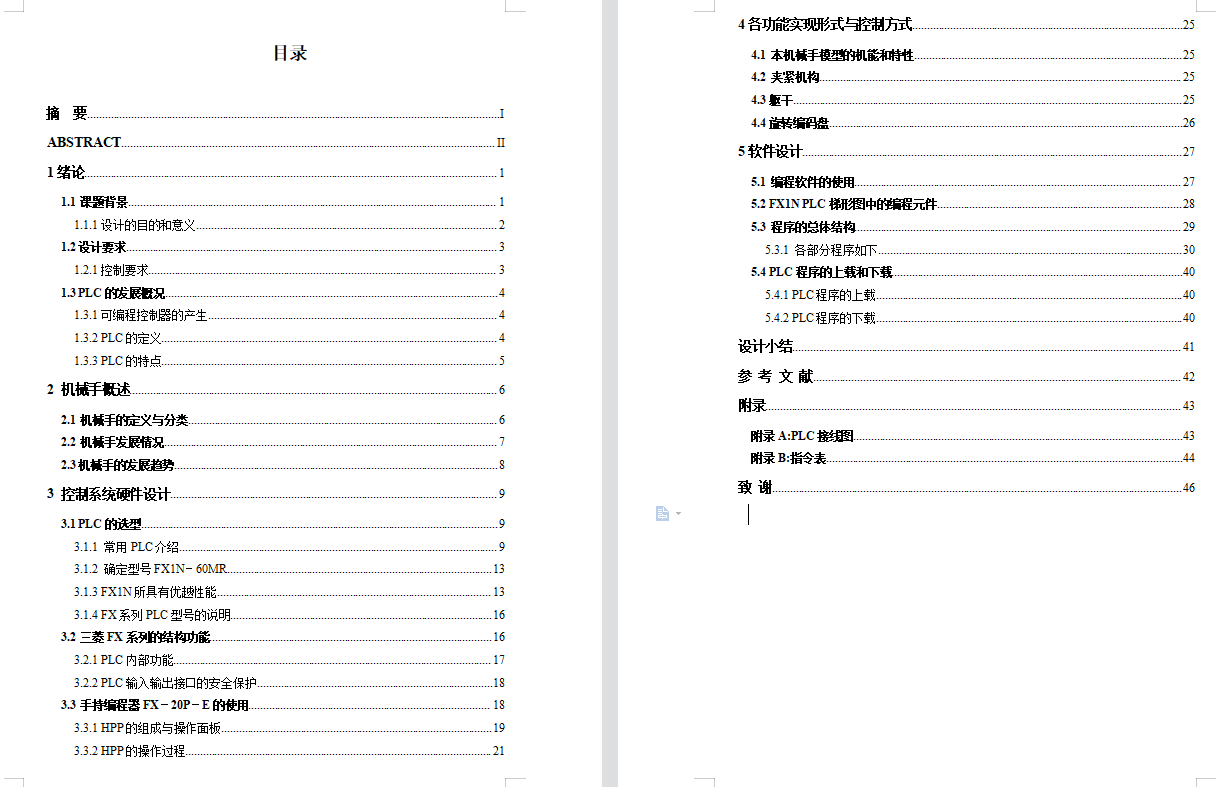
学习资料中的CAD图纸详细标注了机械结构的关键尺寸与装配关系,为硬件选型与布局优化提供直观参考;外文文献则从控制理论角度分析了PID参数整定、模糊控制等算法在机械手系统中的应用效果,为软件优化提供理论支撑。开题报告与文件综述系统梳理了研究背景、技术路线与创新点,帮助读者快速定位研究价值。本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
六自由度工业机器人设计【说明书(论文)+CAD图纸+SolidWorks三维图+任务书+开题报告】
03/12
59
100吨四柱液压机(全套共86份CAD图纸+使用说明书)
03/04
53
180吨转炉倾动机构设计【论文+5张CAD图纸】 备注:此份资料有2张CAD图纸未标注尺寸,请自行补齐。
02/05
58
基于有限元比亚迪F3制动器的设计(说明书+CAD图纸+ProE三维图+ 开题报告+任务书+答辩相关材料)
02/02
58
【4层】办公楼全套设计(2400平左右,含计算书,施工组织设计,横道图,平面布置图,建筑图, 结构图)
01/29
54
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn