多用途气动机器人结构设计聚焦于通过气动驱动系统实现机械结构的灵活操作,其核心作用在于整合气动元件与机械模块,构建具备多场景适应能力的执行平台。该设计以压缩空气为动力源,通过气缸、电磁阀及管路系统的协同控制,驱动末端执行器完成抓取、搬运、定位等基础动作。相较于传统电动或液压驱动方案,气动系统具有响应速度快、结构轻量化、环境适应性强等优势,尤其适用于需要频繁启停或对负载重量敏感的工业场景。其结构设计需兼顾气动回路布局的合理性、机械臂刚度与柔性的平衡,以及模块化组件的互换性,确保系统在复杂工况下仍能保持稳定运行。
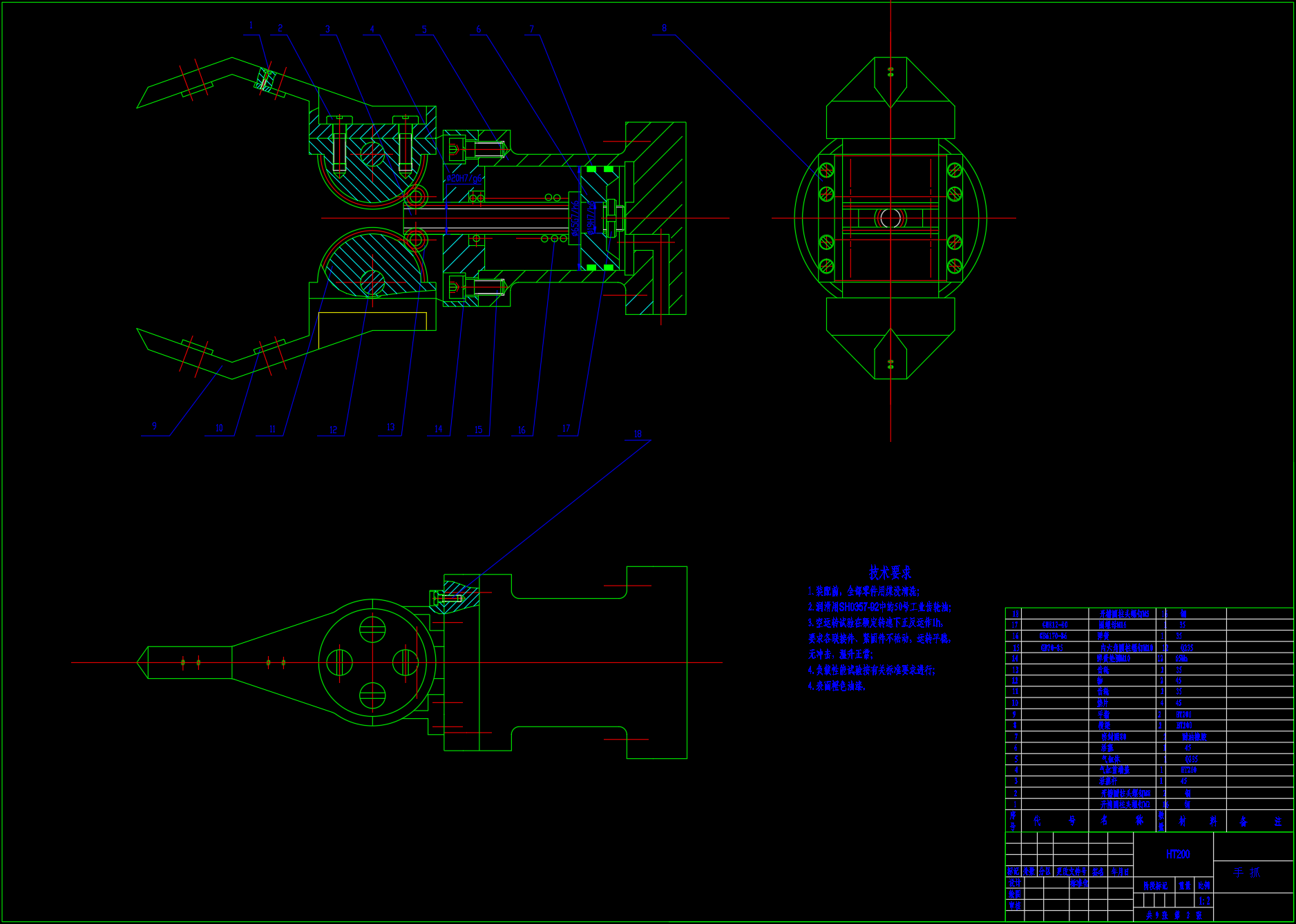
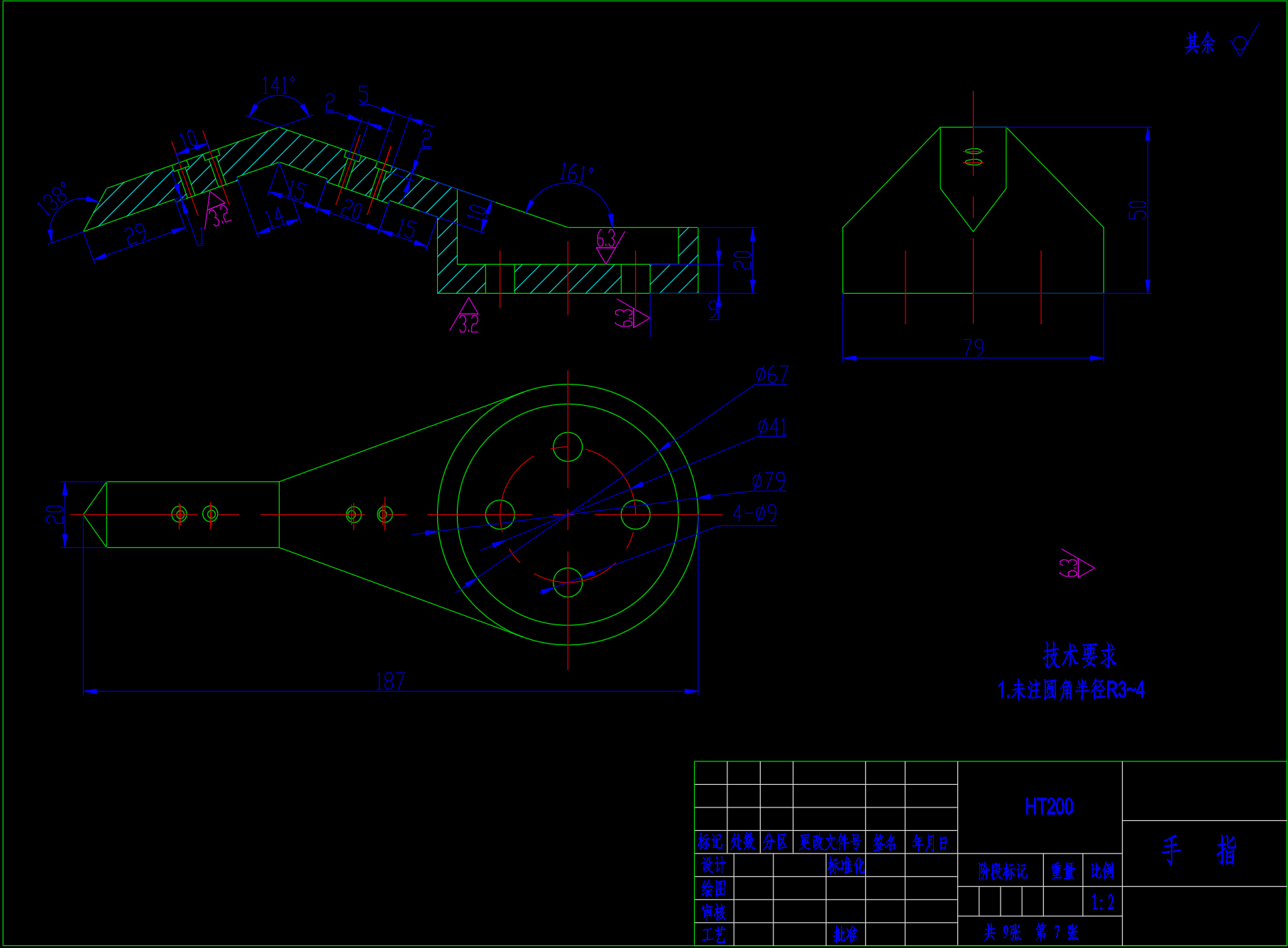
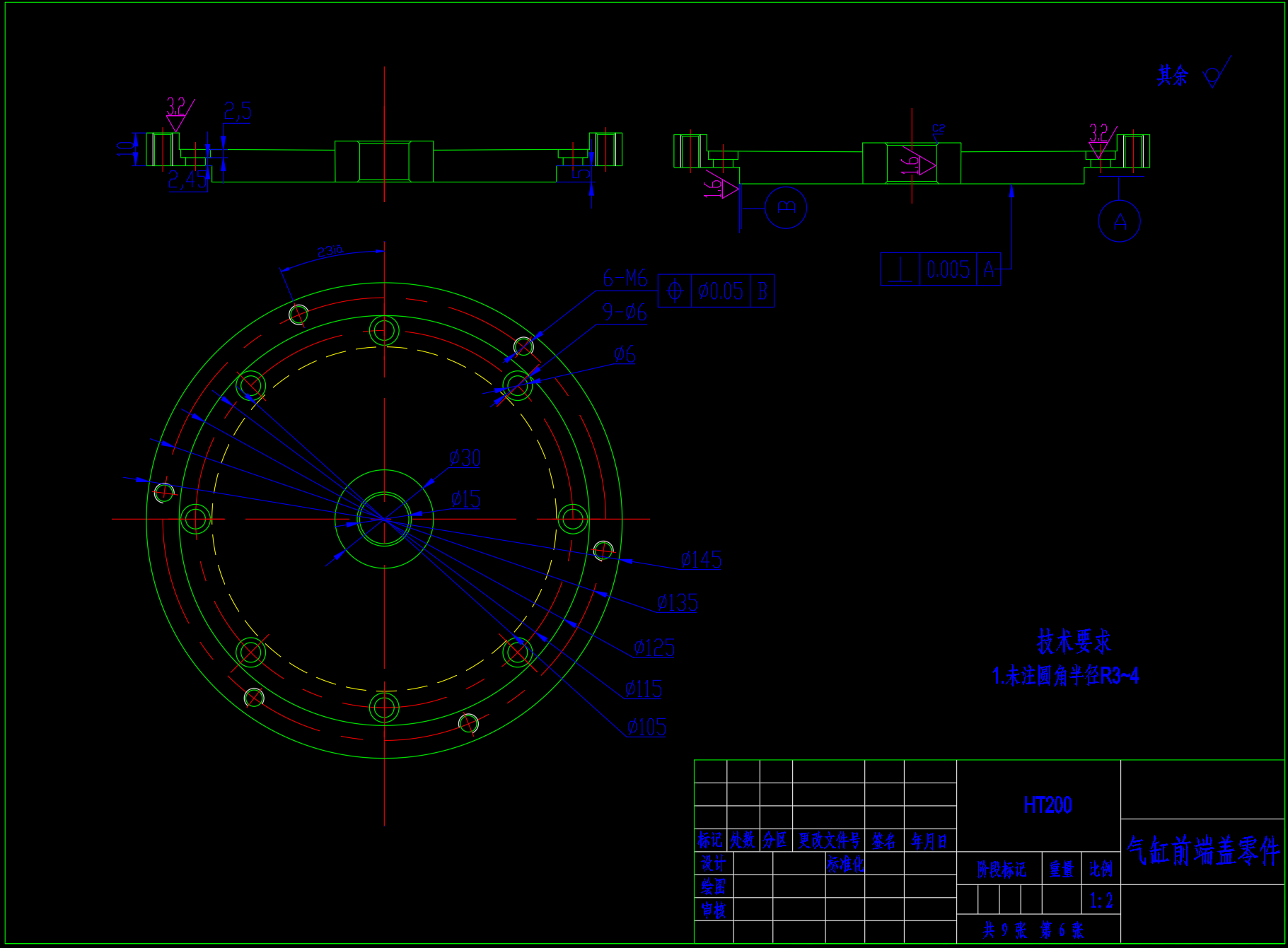
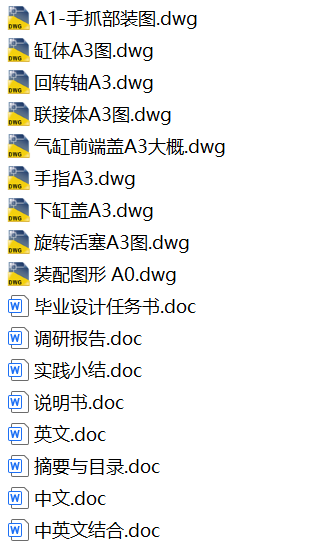
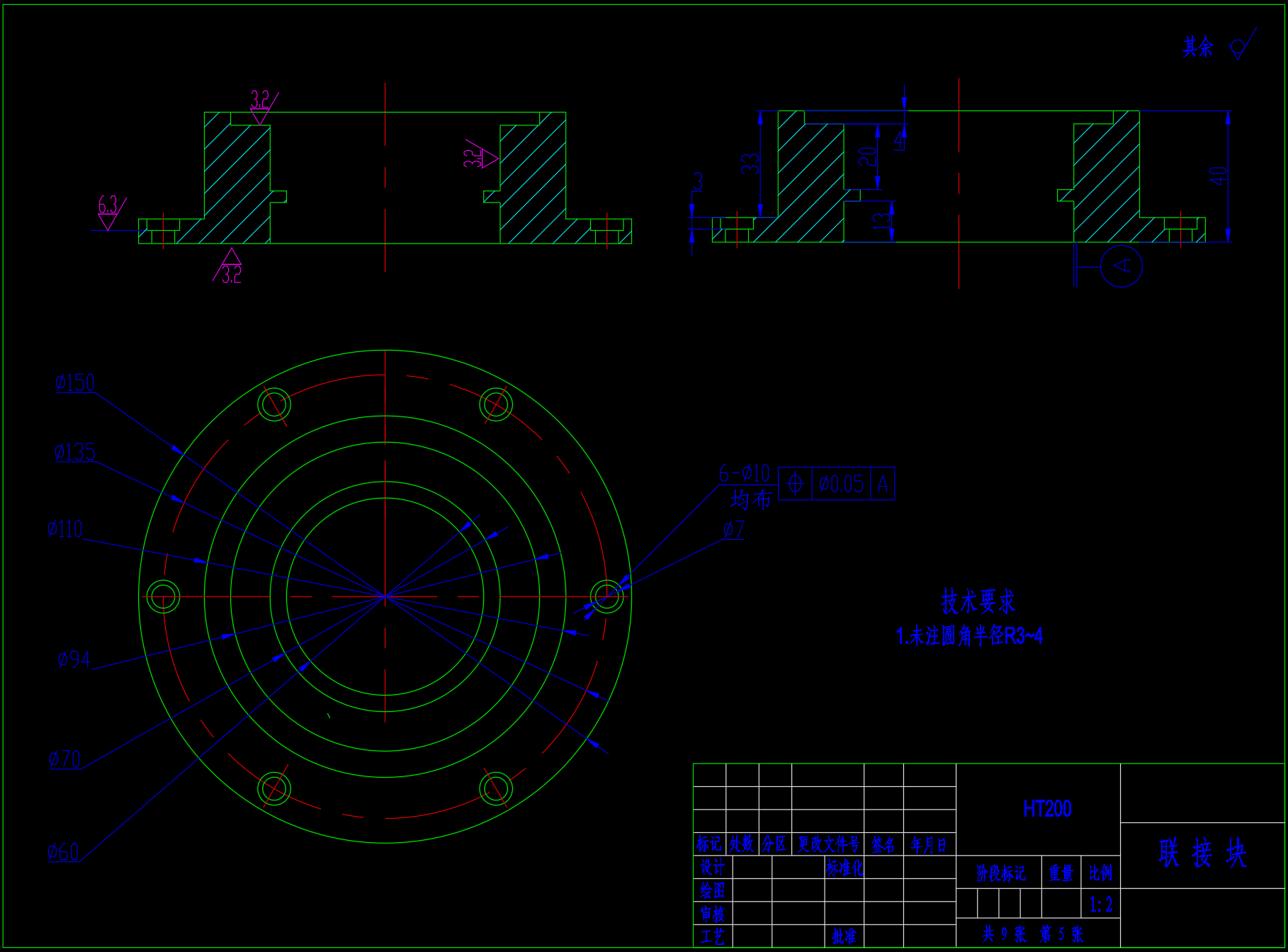
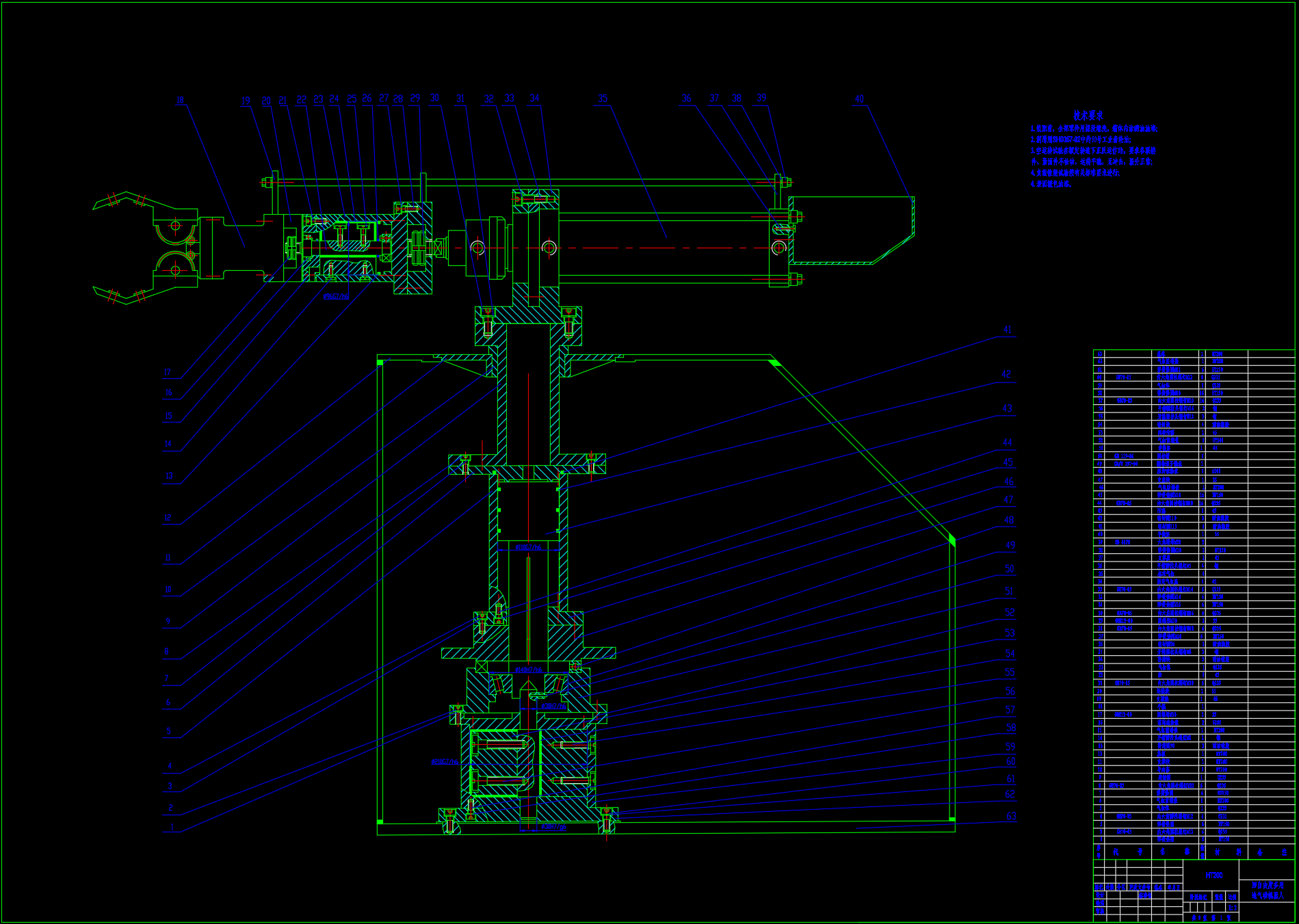
学习资料中包含的DWG图纸详细展示了气动机器人的三维模型与装配关系,涵盖底座、旋转关节、伸缩臂及末端夹爪等关键部件。图纸通过分层标注的方式,清晰呈现了气动管路走向、连接件规格及装配顺序,为实际搭建提供了可视化参考。任务书部分则明确了设计目标与验证指标,例如要求末端执行器定位精度达到毫米级、最大负载能力满足特定范围,同时强调系统需支持至少三种工具的快速更换,以适应不同作业需求。这些要求为结构设计提供了明确的性能边界与功能导向。
翻译文档针对气动控制领域的专业术语进行了标准化处理,确保中英文表述的技术一致性。例如,将“气动伺服系统”译为“pneumatic servo system”,并补充了“比例阀控制精度”等关键参数的英文对应词,为国际技术交流提供便利。调研报告通过对比分析现有气动机器人的应用案例,总结了结构优化的常见方向,如采用轻质合金材料降低惯性、通过并联机构提升负载能力等,为设计提供了实践依据。实践小结则记录了样机测试中的关键数据,例如气缸行程误差、系统能耗波动等,为后续改进提供了量化参考。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。