卡车胎成型车间卸胎手作为轮胎制造流程中的关键设备,其设计直接关系到轮胎脱模效率与操作安全性。传统卸胎方式依赖人工或简易机械结构,存在劳动强度大、动作精度低、安全隐患多等问题。针对这一痛点,新型卸胎手设计聚焦于机械结构优化与自动化控制集成,通过模块化设计实现多工位协同作业,显著缩短轮胎脱模周期,同时降低操作人员技能依赖度,为车间标准化作业提供硬件支撑。
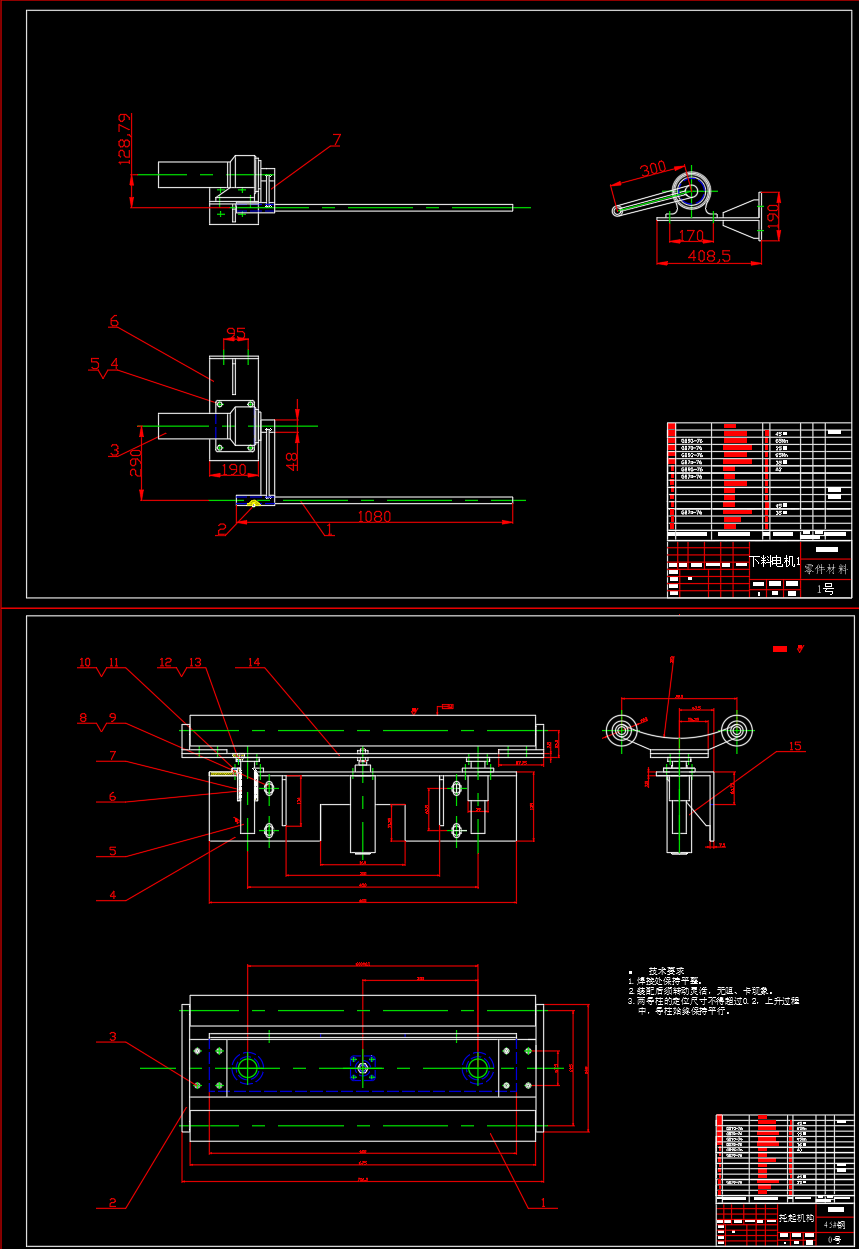
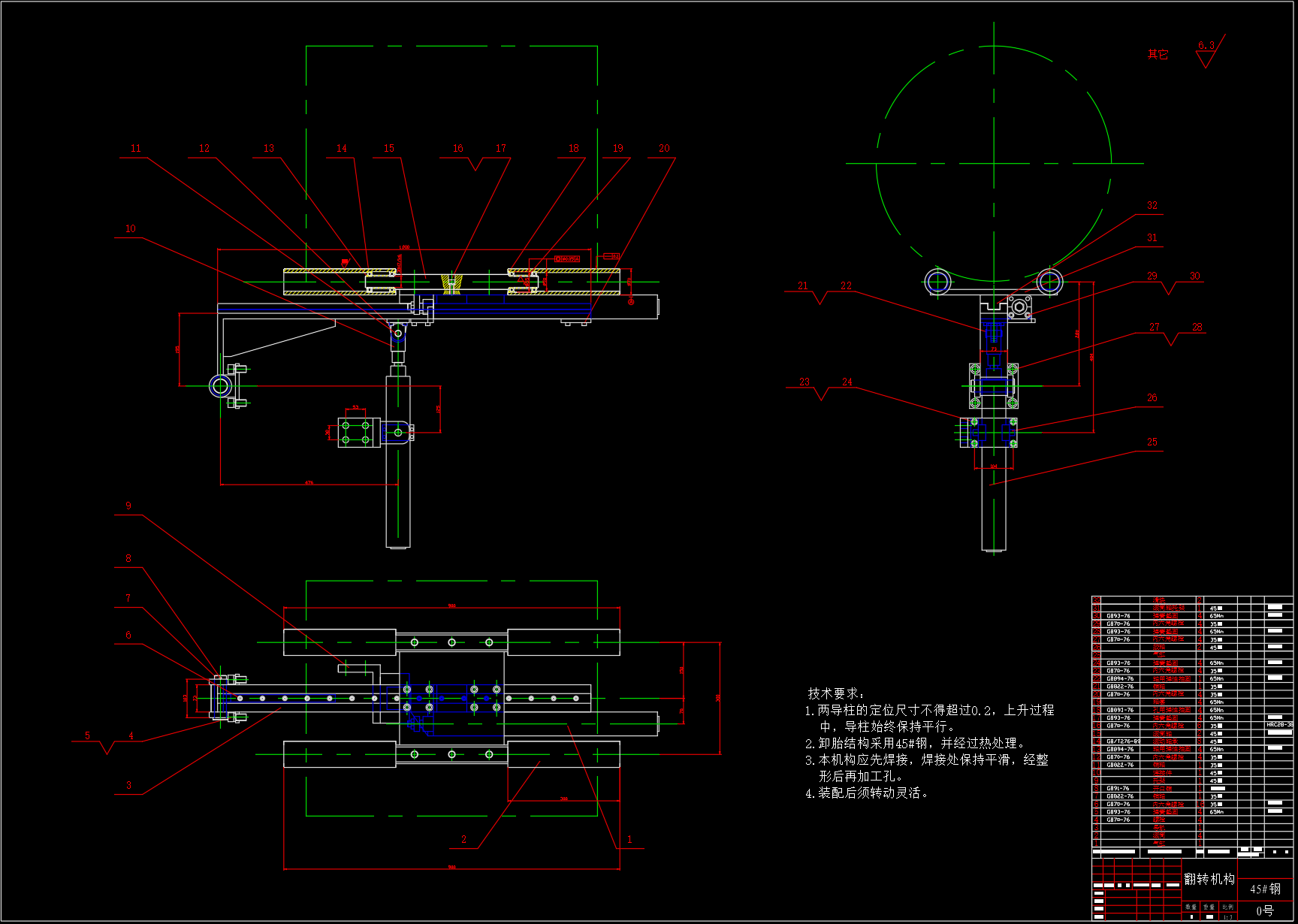
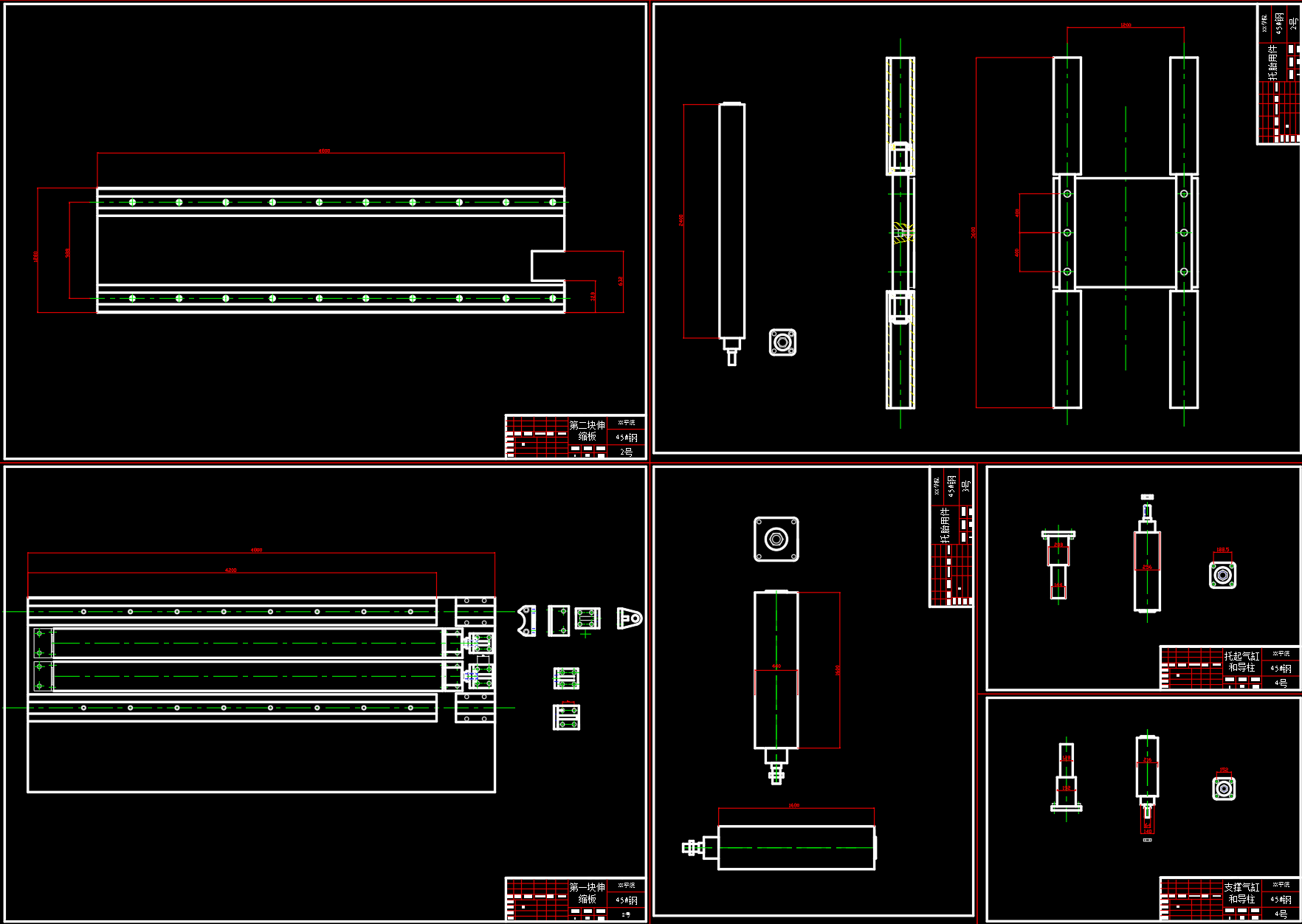
机械结构方面,卸胎手采用仿生学原理设计抓取机构,通过多自由度关节组合实现柔性抓取与精准定位。抓取臂采用高强度铝合金与碳纤维复合材料,在保证结构刚性的同时减轻整体重量,避免因设备自重导致的定位偏差。传动系统选用谐波减速器与伺服电机组合,实现无级变速与微米级位移控制,确保抓取过程中轮胎表面不受损伤。此外,设备底部集成自适应调节模块,可自动匹配不同规格轮胎的轴向尺寸,提升设备通用性。
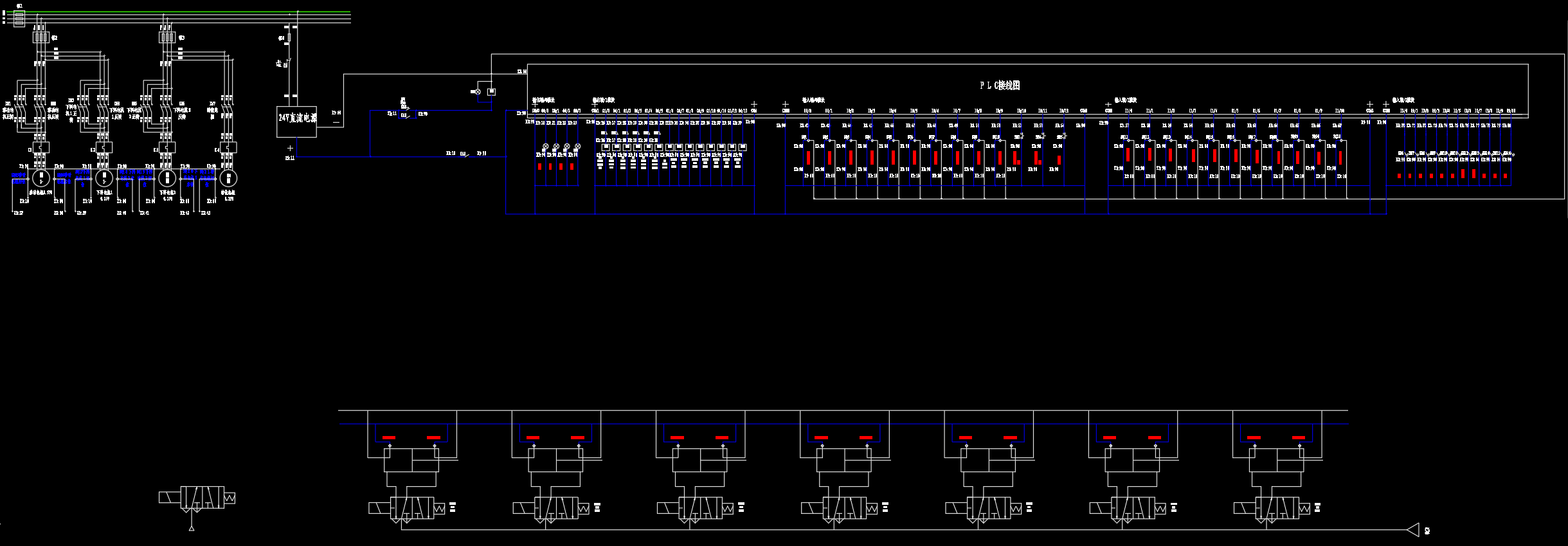
控制系统以PLC为核心,通过传感器网络实时采集抓取力、位移、角度等参数,构建闭环反馈系统。当抓取力超过设定阈值时,系统自动触发保护机制,避免轮胎或设备损坏;位移传感器则确保抓取臂在三维空间内的运动轨迹符合预设路径,防止碰撞事故。人机交互界面采用触摸屏设计,操作人员可通过图形化界面快速切换工作模式、调整参数,并实时监控设备运行状态,提升操作便捷性。
学习资料中包含的CAD图纸详细标注了各零部件的装配关系与尺寸公差,为设备加工与组装提供精确指导;PLC电路图则明确了电气元件的连接方式与信号流向,便于后期维护与故障排查。开题报告与任务书从设计目标、技术路线、进度安排等维度梳理项目框架,为设计过程提供系统性规划;文献综述部分整合了国内外同类设备的研究进展,为创新点提炼提供理论依据;翻译资料则补充了国际前沿技术动态,拓宽设计视野。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。