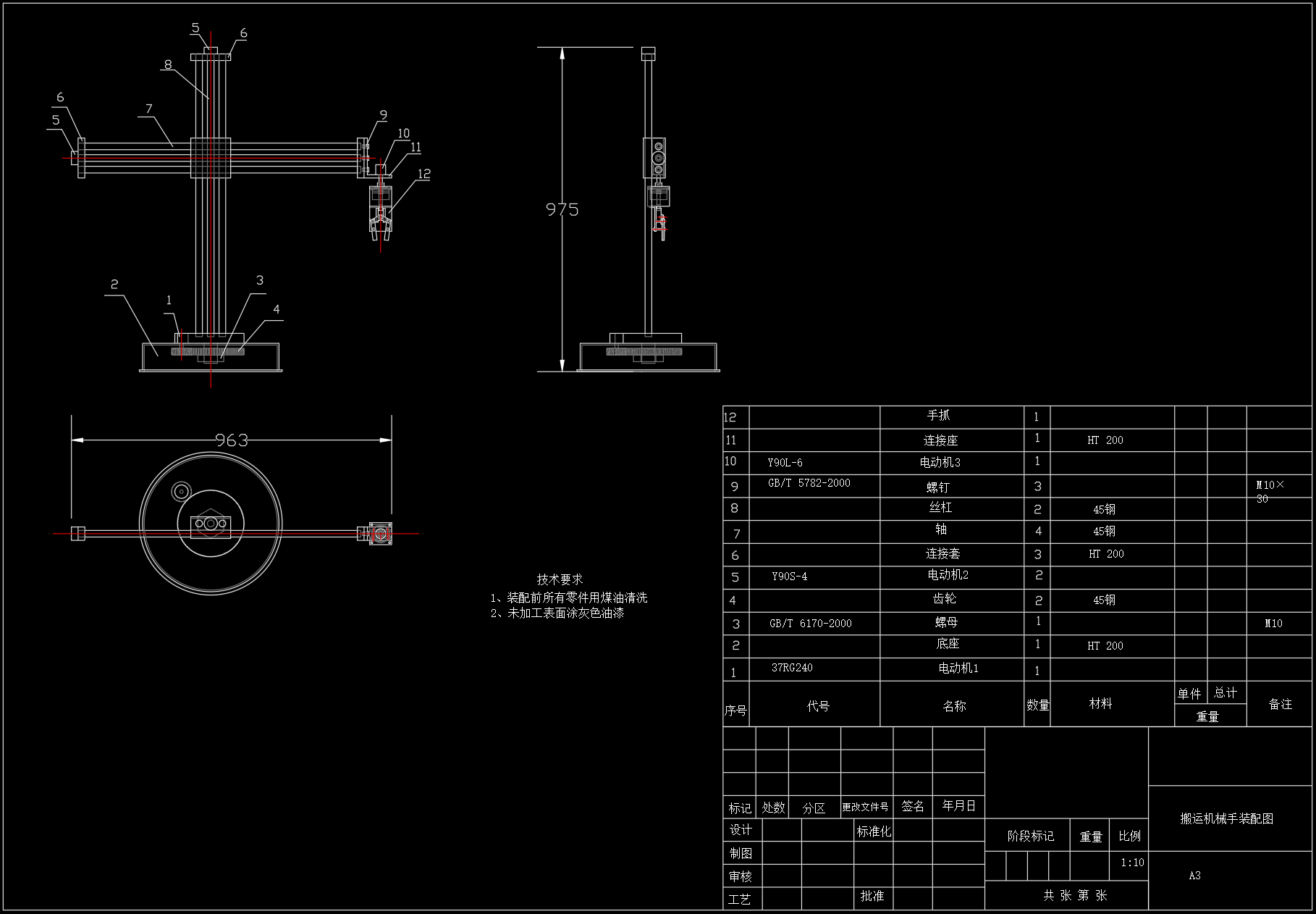
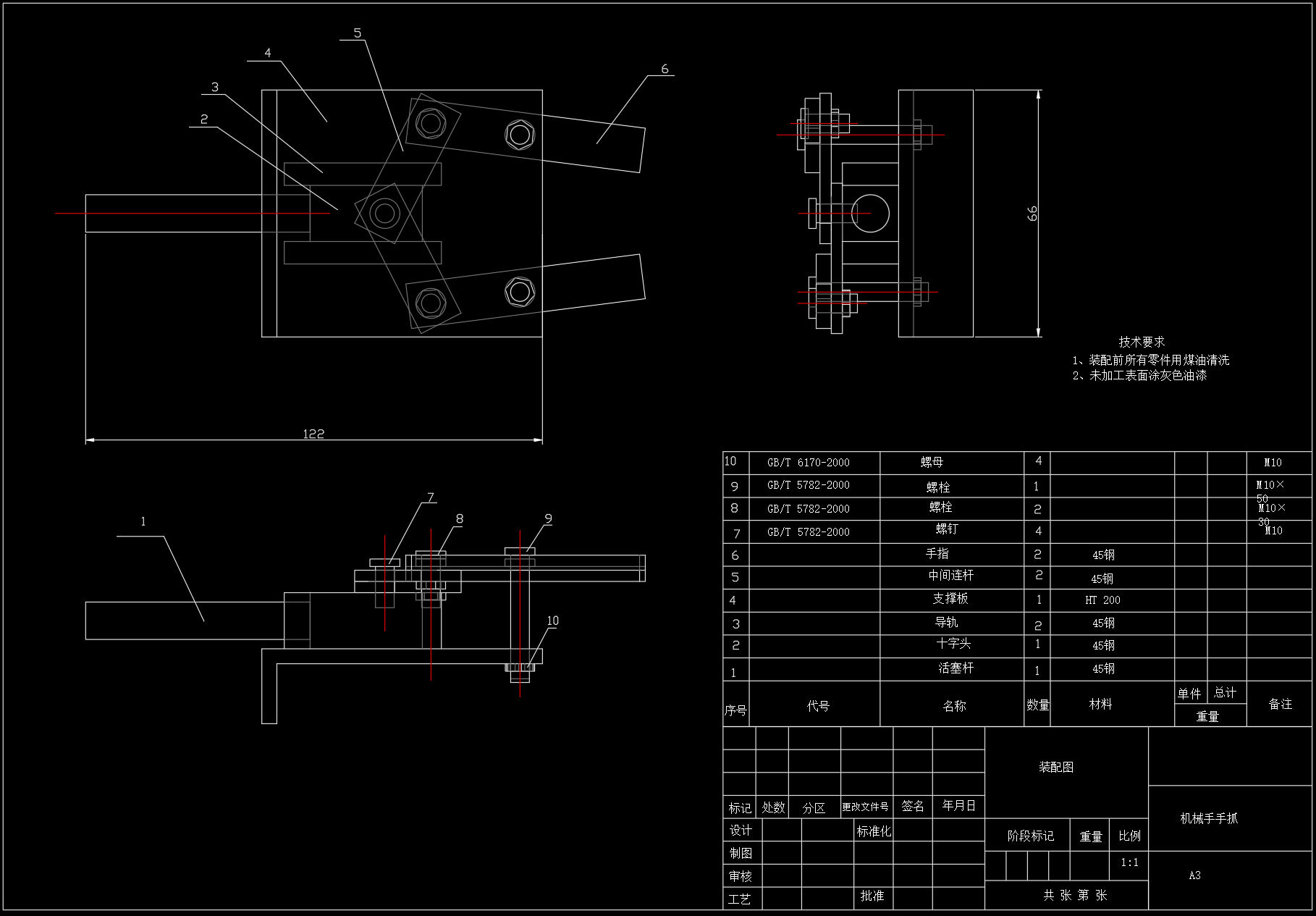
三自由度圆柱坐标型搬运机械手作为自动化领域的重要设备,其核心作用在于通过精确的空间定位与灵活的姿态调整,实现物料在三维空间内的高效搬运。该机械手采用圆柱坐标系设计,由旋转、升降及径向伸缩三个运动轴构成,分别对应水平旋转、垂直升降和水平伸缩动作。这种结构布局既保留了直角坐标型机械手定位精准的优势,又通过旋转轴的引入显著扩大了工作范围,尤其适用于圆柱形工作区域内的物料抓取与放置任务,例如环形生产线、仓储货架等场景。
从机械结构来看,其旋转轴通常安装于基座,通过齿轮或伺服电机驱动实现水平旋转;升降轴垂直布置于旋转模块,采用滚珠丝杠或同步带传动实现上下运动;径向伸缩轴则通过导轨滑块结构实现水平方向的伸缩动作。三个轴的协同运动使末端执行器能够覆盖圆柱形空间内的任意位置,同时通过调整各轴的运动顺序与速度,可优化搬运路径,减少非必要位移,从而提升作业效率。
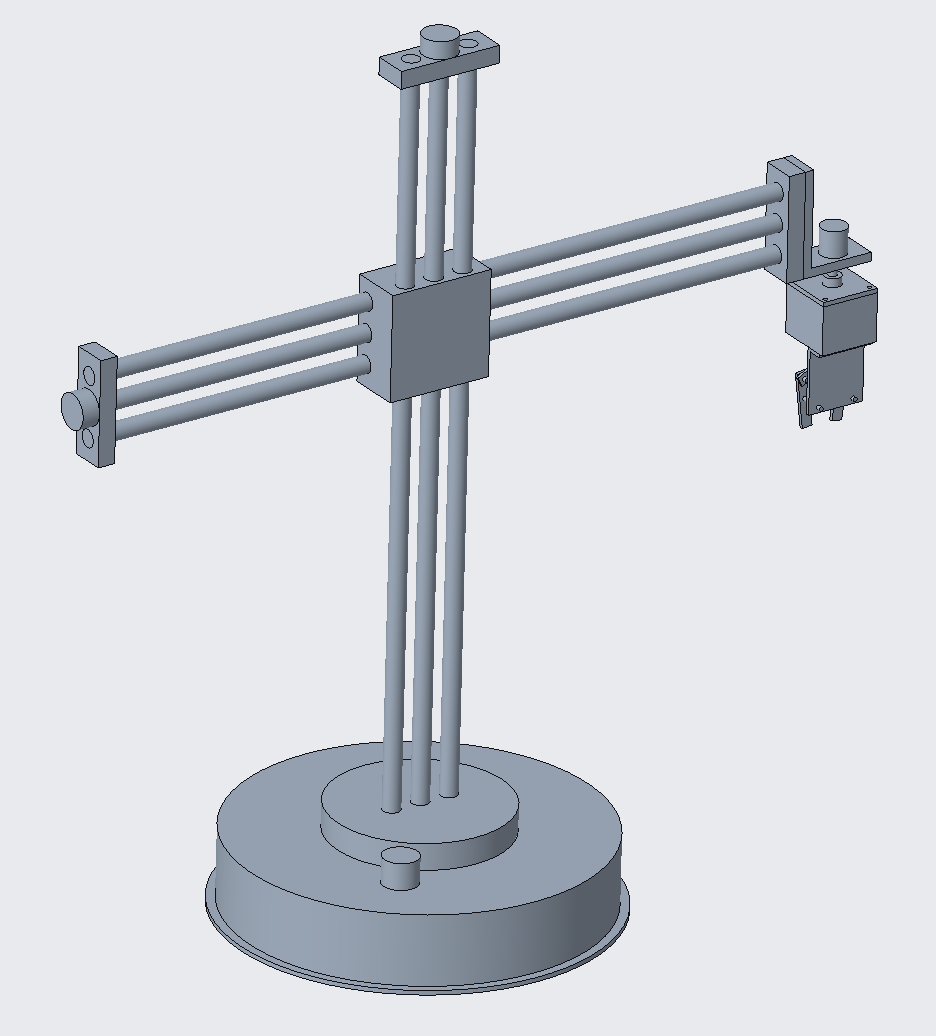
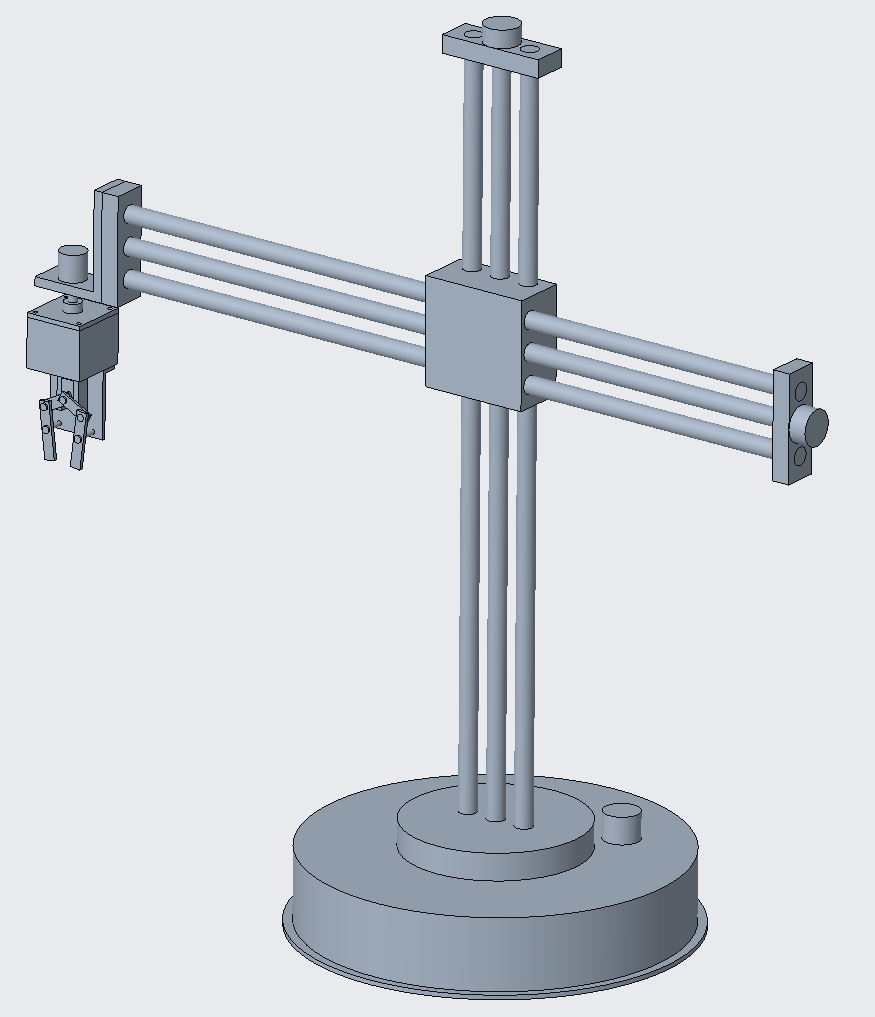
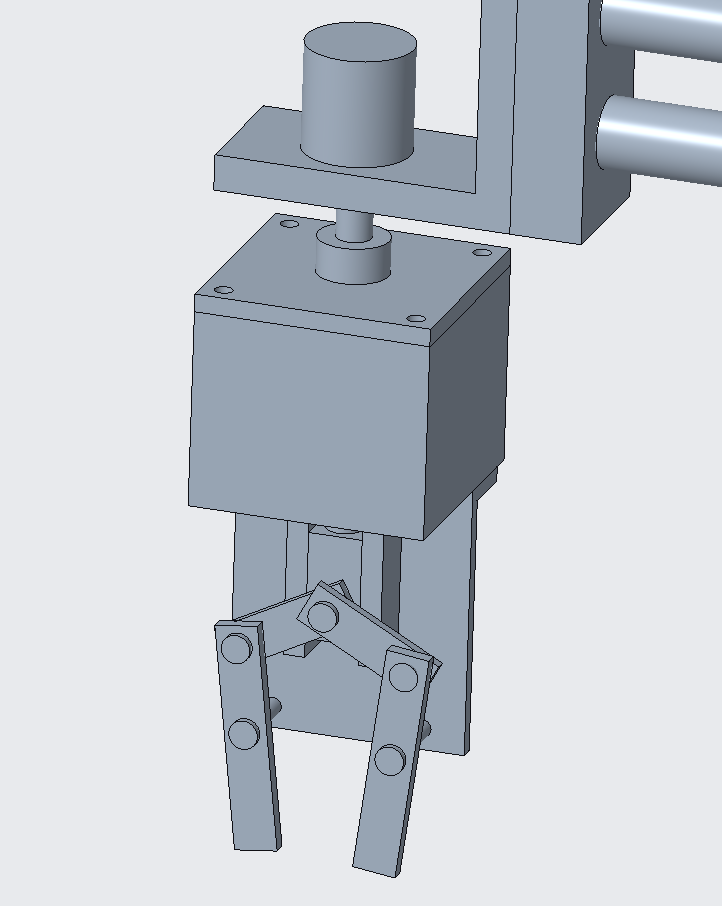
在二维图与三维模型设计中,CAD与Creo软件分别承担了不同阶段的任务。二维图侧重于机械结构的详细表达,包括各轴的传动方式、连接关系、关键尺寸标注及装配工艺说明,为后续加工与组装提供指导;三维模型则通过Creo的参数化建模功能,直观呈现机械手的整体形态、运动范围及干涉检查,辅助设计者优化结构布局。例如,通过三维模型可模拟末端执行器在不同姿态下的可达性,提前发现潜在的设计缺陷,避免后期修改带来的成本增加。
PPT文档则聚焦于设计思路的梳理与成果展示,通过图文结合的方式阐述圆柱坐标型机械手的选型依据、运动学分析、关键部件设计及仿真验证过程。其内容既包含理论框架的搭建,如坐标系选择与运动学方程推导,也涵盖实际设计中的技术要点,如传动效率优化、轻量化设计及材料选型,为读者提供从概念到落地的完整认知路径。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。