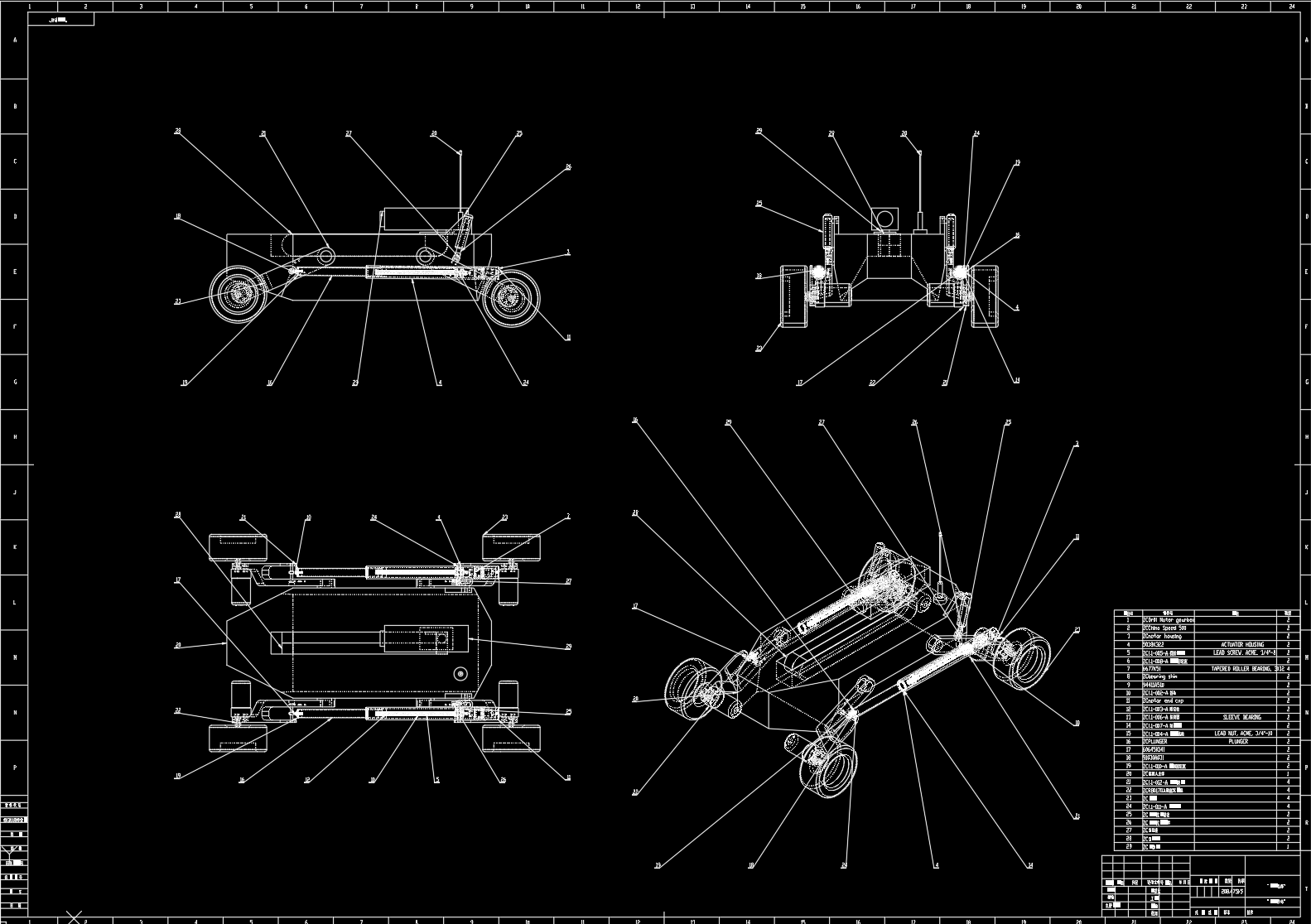
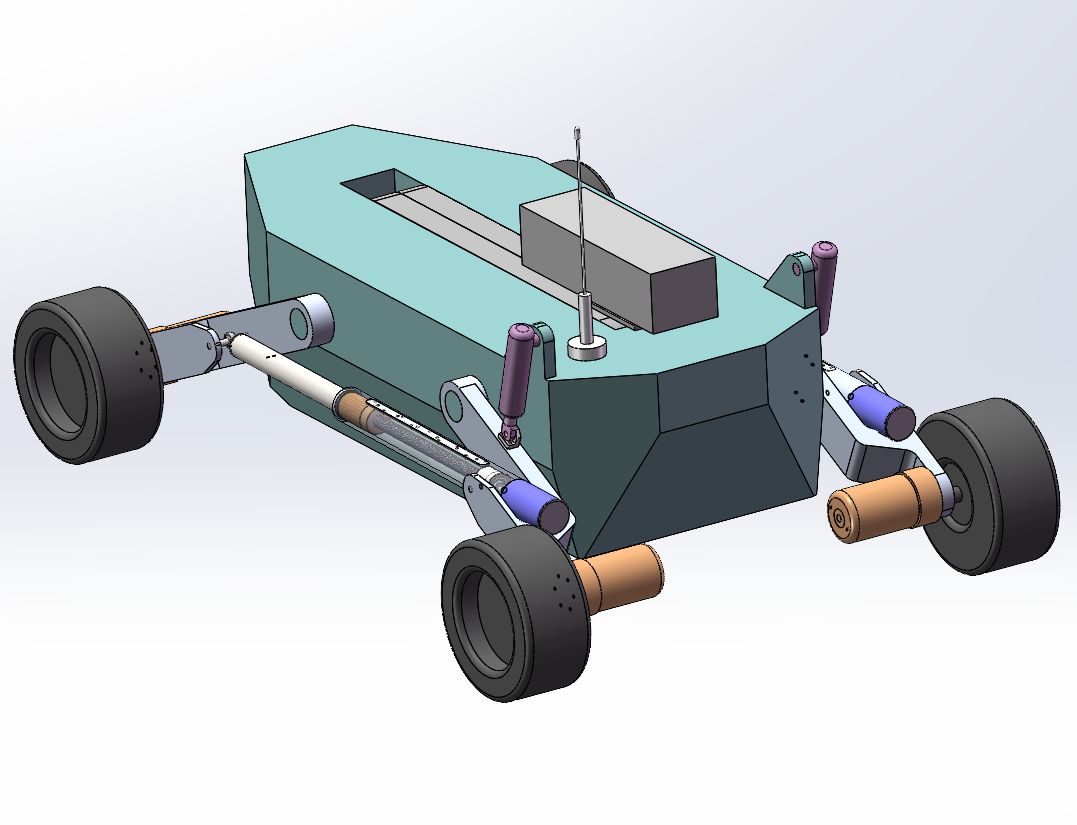
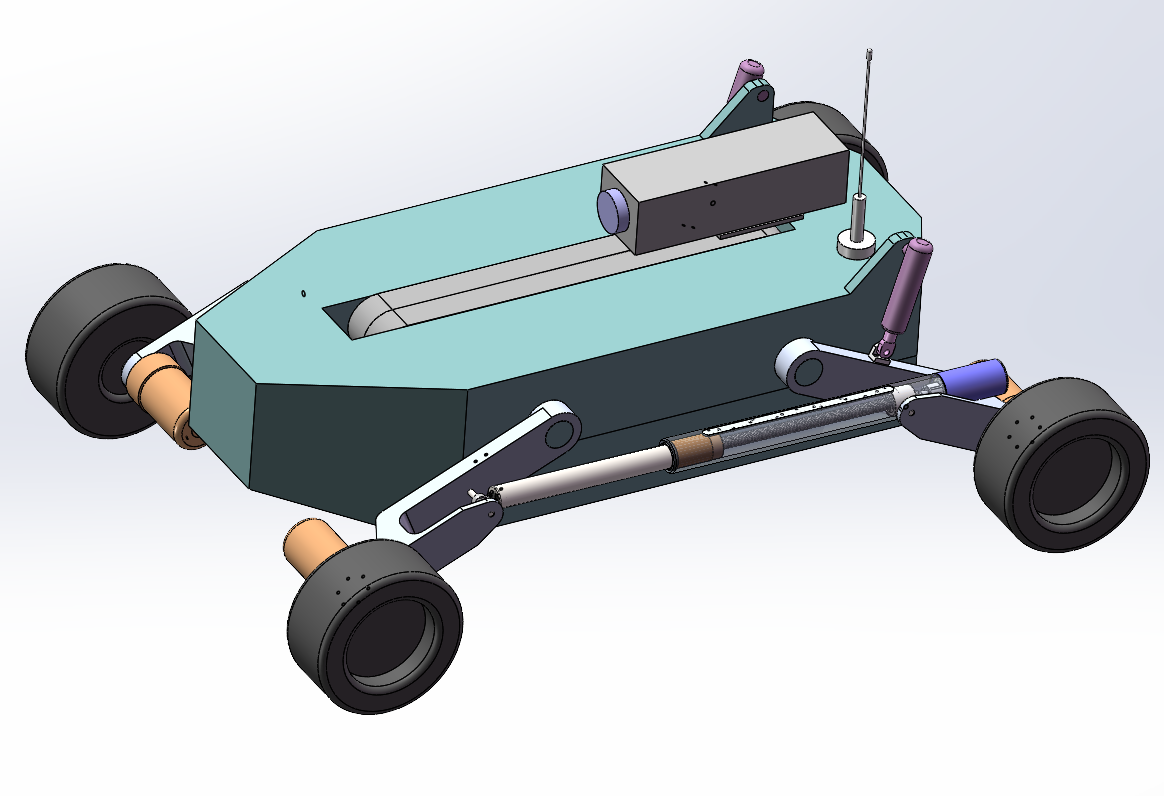
四轮侦察机器人作为移动侦察领域的重要载体,其设计需兼顾机械结构稳定性、环境适应性及功能可扩展性。SolidWorks与CAD的协同应用为机器人设计提供了高效工具链:SolidWorks用于三维建模与装配验证,可直观呈现车体、轮系、传感器支架等部件的空间布局;CAD则侧重二维工程图的标准化输出,确保各零件尺寸精度与加工可行性。通过参数化设计方法,可快速调整轮距、轴距等关键参数,显著缩短设计迭代周期,为后续功能优化预留充足空间。
机械结构是机器人实现侦察功能的基础。车体采用高强度铝合金框架,既保证结构刚度又减轻整体重量;四轮独立悬挂系统通过弹簧阻尼组件吸收地面冲击,提升复杂地形通过性;驱动模块集成减速电机与编码器,实现速度闭环控制,确保运动平稳性。传感器布局需兼顾侦察范围与数据准确性,例如将激光雷达置于车体顶部以扩大扫描半径,摄像头采用多角度安装方案覆盖前后左右四个方向,形成全方位环境感知网络。
毕业论文需系统阐述设计原理与验证方法。从需求分析入手,明确侦察任务对机器人续航、负载、通信距离等指标的要求;通过理论计算确定电机功率、电池容量等核心参数;借助有限元分析验证车体应力分布,确保结构可靠性;最后通过实测数据对比仿真结果,验证设计合理性。论文撰写需注重逻辑严谨性,避免主观臆断,所有结论均需以实验或仿真结果为支撑。
运动仿真视频是设计成果的重要展示形式。通过SolidWorks Motion模块模拟机器人越障、转向等典型工况,直观呈现悬挂系统变形、轮子滑移率等动态参数;结合渲染技术生成高清动画,清晰展示传感器工作状态与数据传输流程。视频内容需与设计方案严格对应,避免过度美化或虚构功能,确保观众能通过可视化手段快速理解设计亮点与技术难点。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。