机械设计资料
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
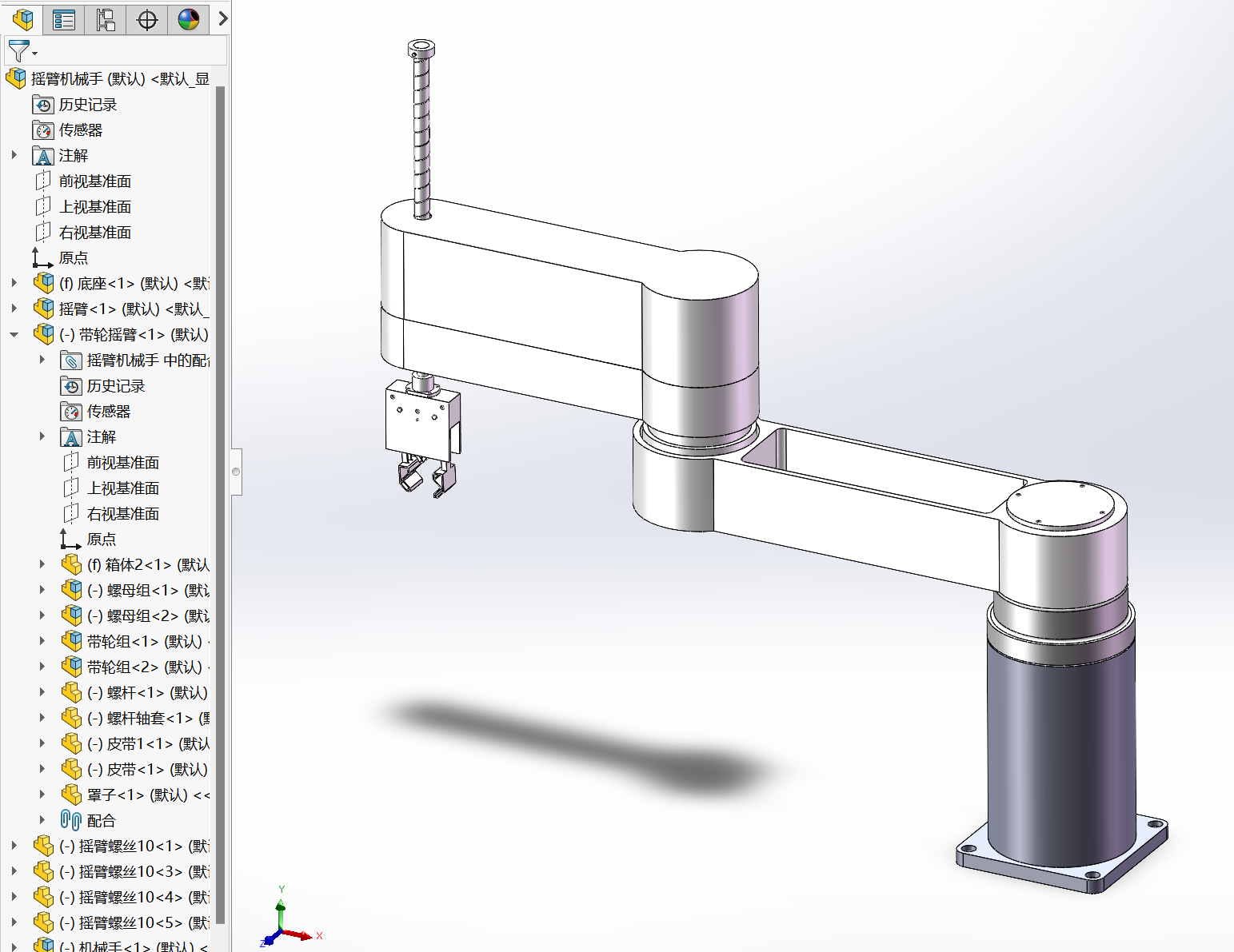
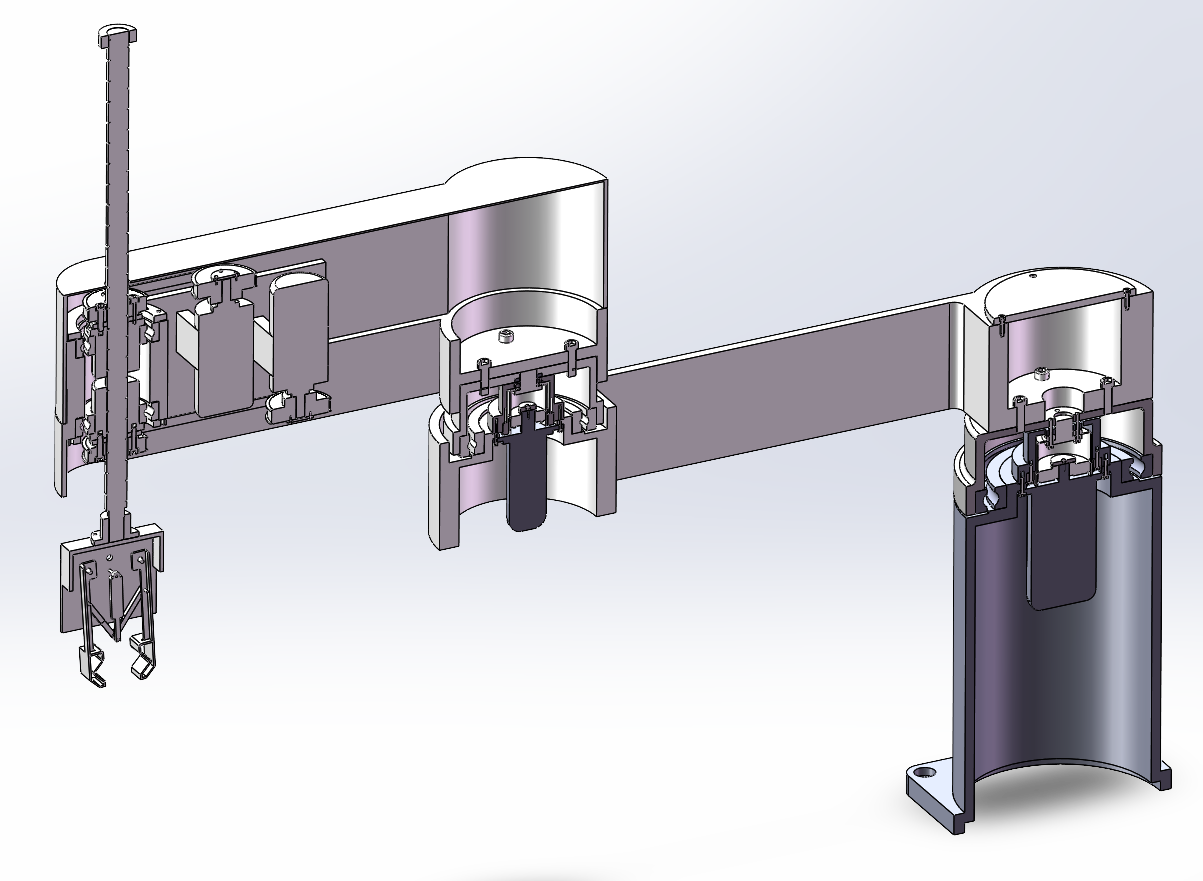
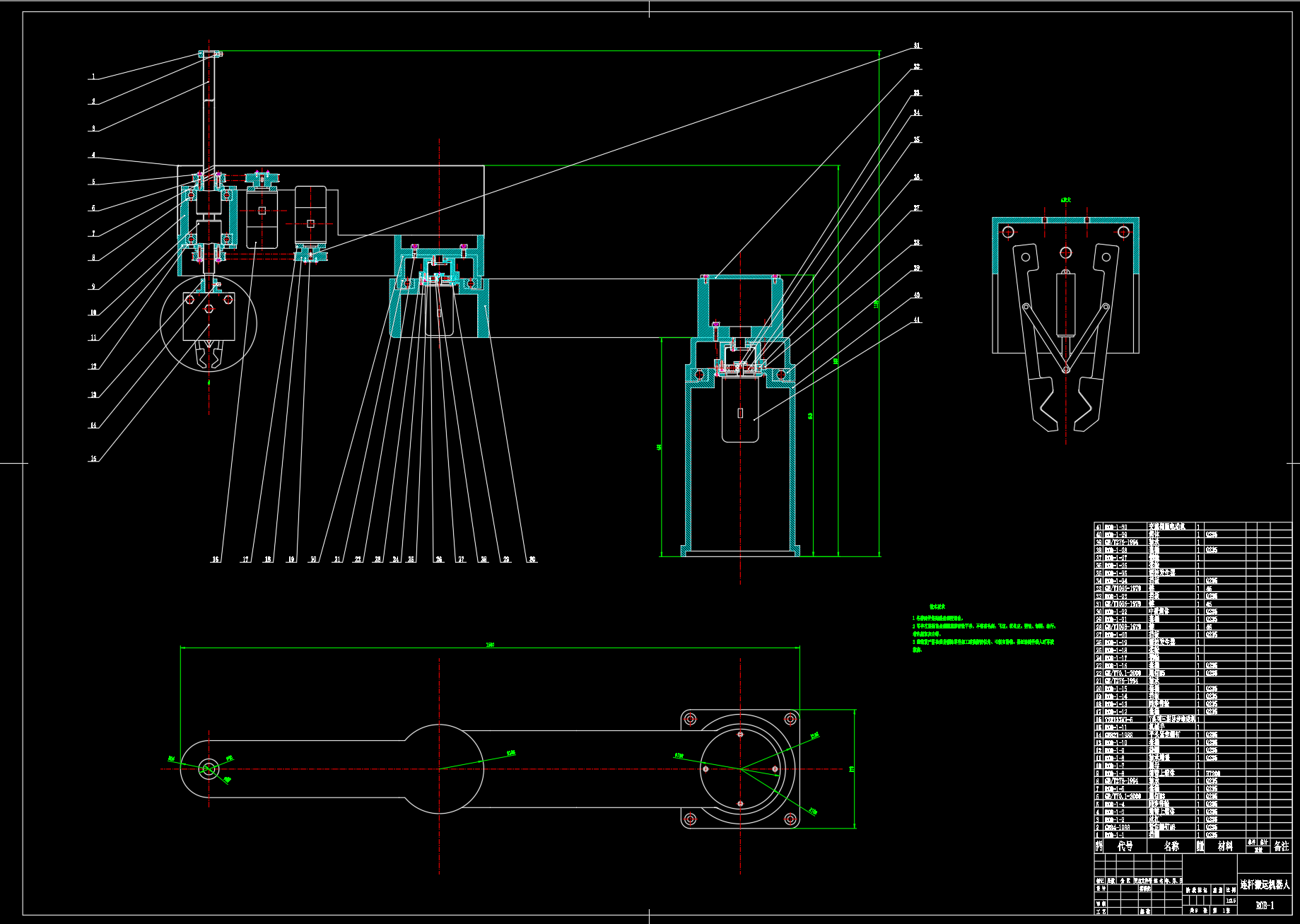
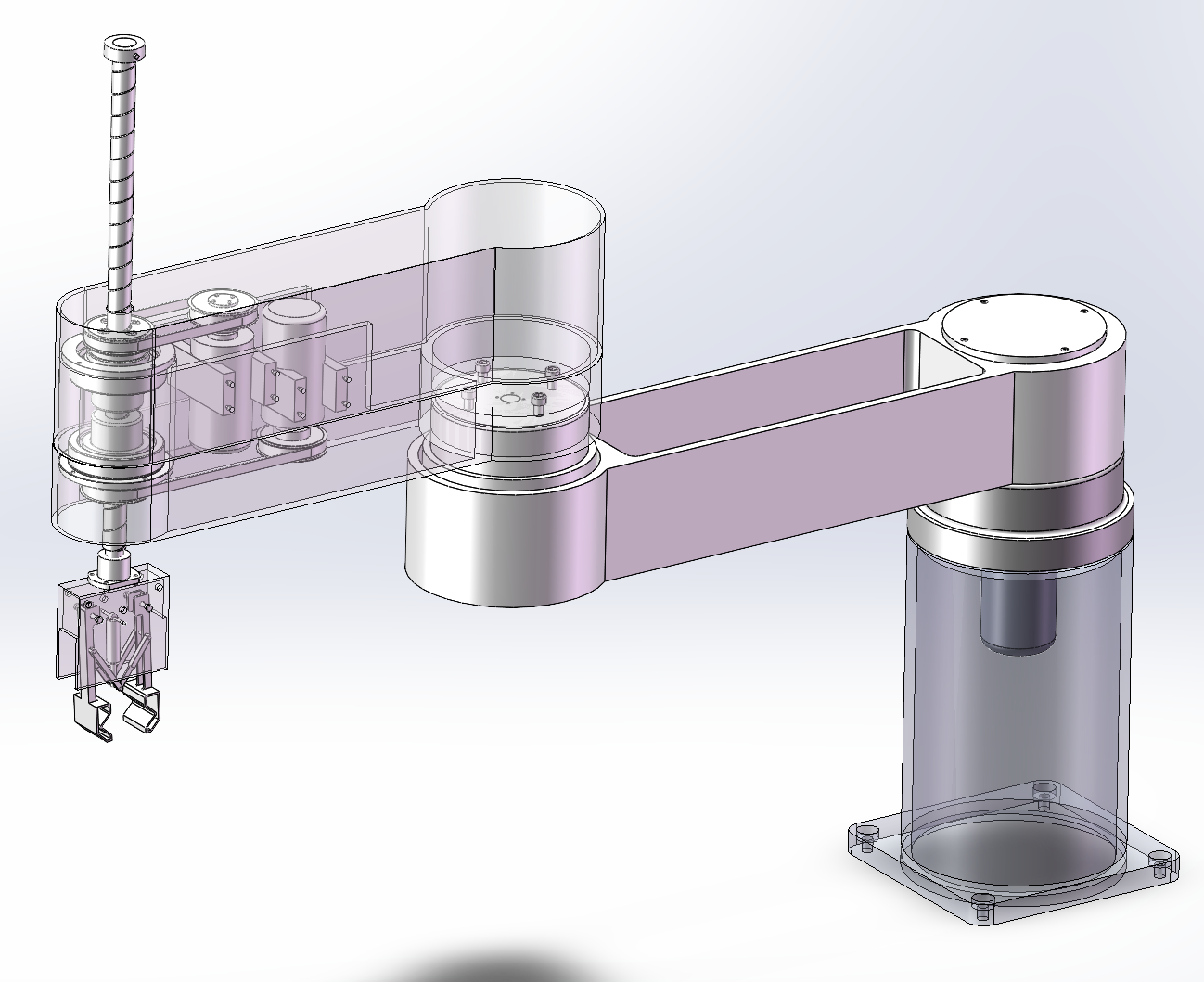
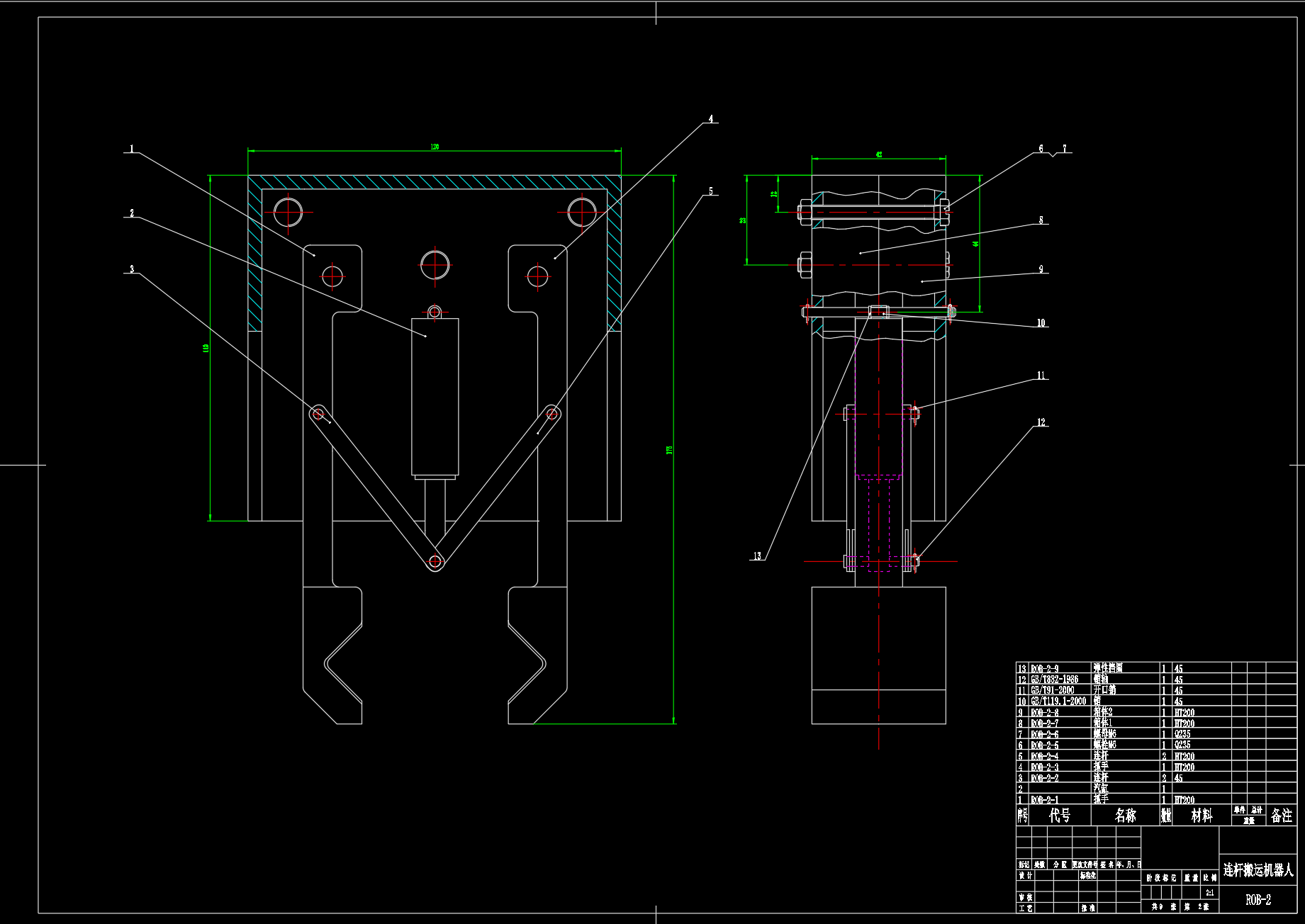
4个自由度 连杆加工搬运机器人设计【说明书+CAD图纸+SW三维+中英文翻译文献+任务书】
来源: 阅读:62
网站管理员
发布于 2026-02-11 08:40
查看主页
针对四自由度连杆加工搬运场景,其设计需兼顾结构紧凑与作业灵活。采用关节式构型,在确保必要工作空间的同时,有效控制整体尺寸。关键环节在于各连杆与运动副的协调设计,这直接决定了末端执行器的定位精度与运行平稳性。相关的学习资料涵盖了从构型选型、部件设计到整体装配的全过程,为类似应用提供了详实的实用参考。通过优化传动与结构布局,能在满足负载要求下显著缩短开发周期,并减少零部件数量。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
机械设计资料
相关推荐
轴承座零件的机械加工工艺规程及夹具设计(说明书+CAD图纸+工序卡)
12/25
65
电机有限元分析(说明书+分析图片+cad+模型)
12/19
63
少齿差行星齿轮专用减速器设计【任务书 说明书 CAD图纸 文献综述 外文翻译 答辩PPT】
12/24
70
建筑环境与设备工程——河南某市某小区室外管网供热系统工程设计
02/16
57
旋转式硬币分离机设计【毕业论文、cad图纸、solidworks三维、外文翻译】
02/05
59
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn