收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
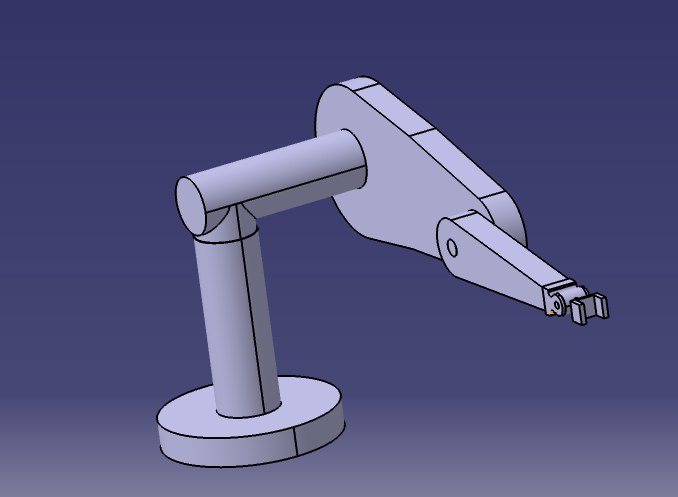
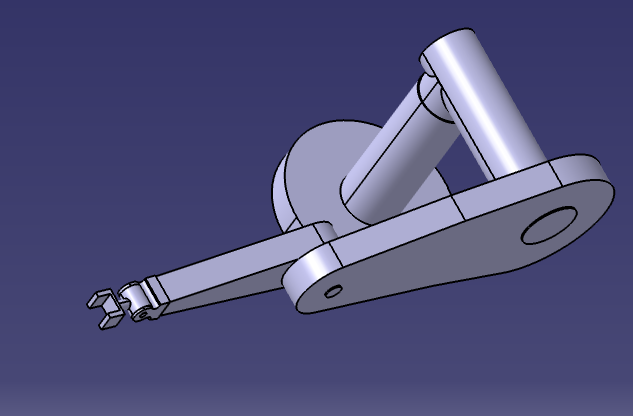
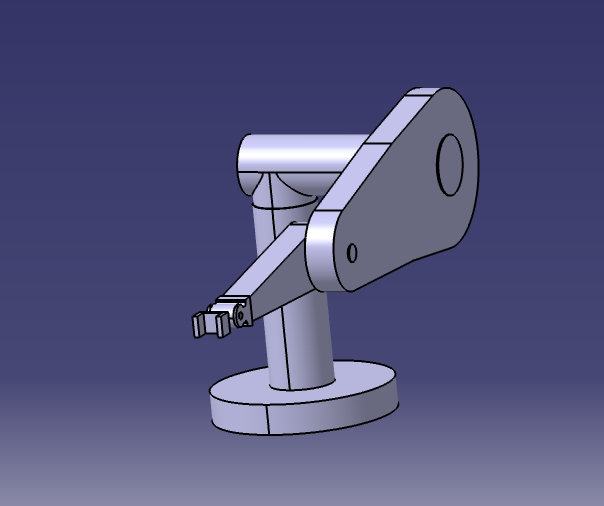
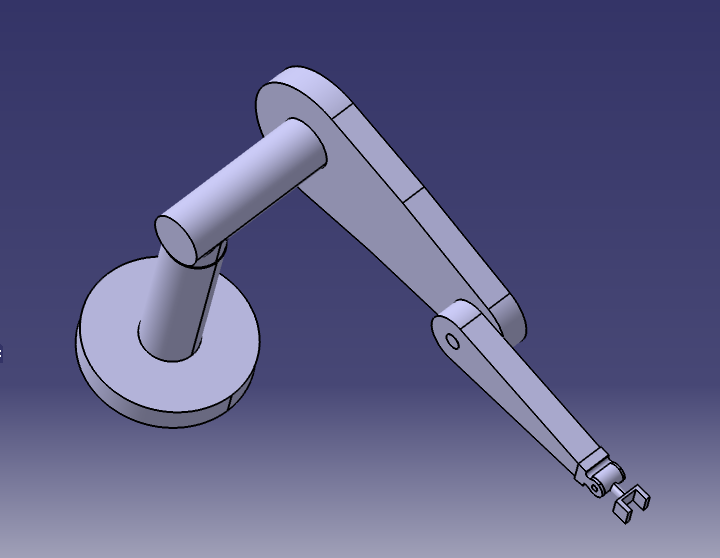
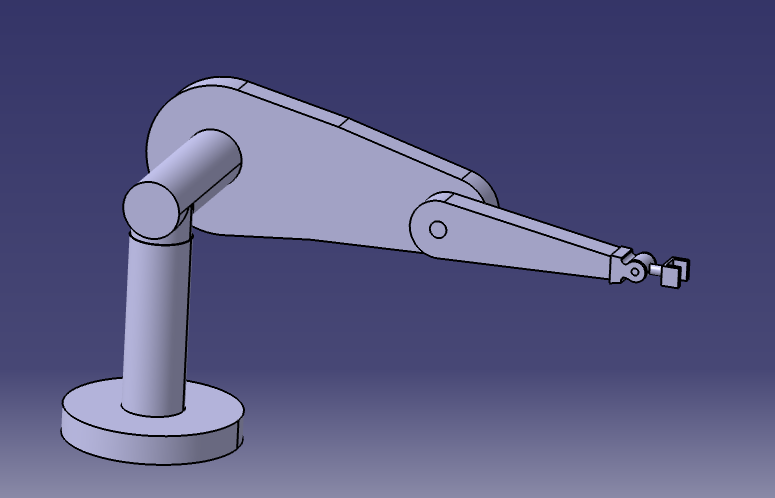
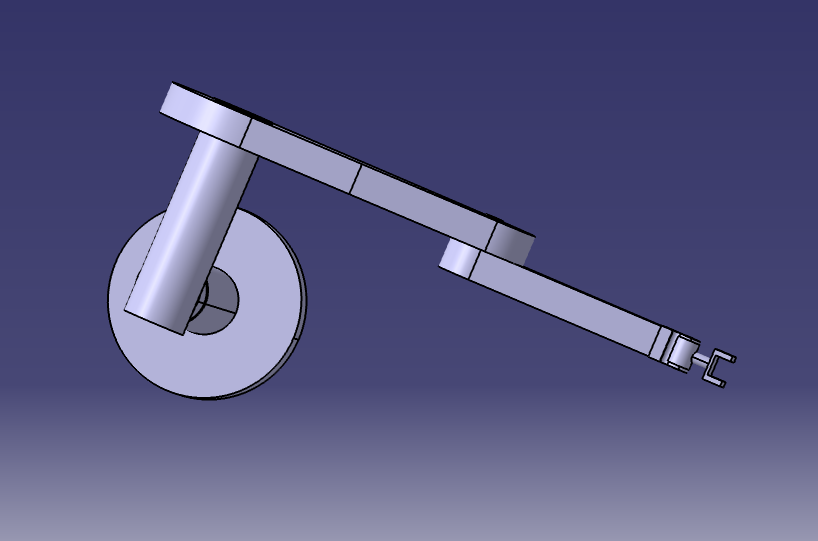
PUMA560机器人运动学分析
来源: 阅读:67
网站管理员
发布于 2026-02-08 10:36
查看主页
PUMA560机器人运动学分析,主要研究关节运动与末端执行器位姿的映射关系。正运动学通过关节变量计算末端位置姿态,逆运动学则根据目标位姿反求关节参数,为轨迹规划和动作控制提供理论支撑,确保机器人运动精准。相关学习资料可辅助理解这一过程,助力掌握机器人运动学基础。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
磷酸反应过工艺流程图
03/19
48
CA6140后托架(831001)加工工艺及夹具设计CAD图纸(论文 CAD图纸 开题报告 任务书 工艺卡 文献翻译)
01/27
62
变电站自动化主接线图
02/14
59
型材折弯机 弯曲机(SolidWorks)
01/30
63
ZH1105柴油机气缸体三面攻螺纹组合机床(左主轴箱)设计
04/08
34
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn