机械设计资料
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
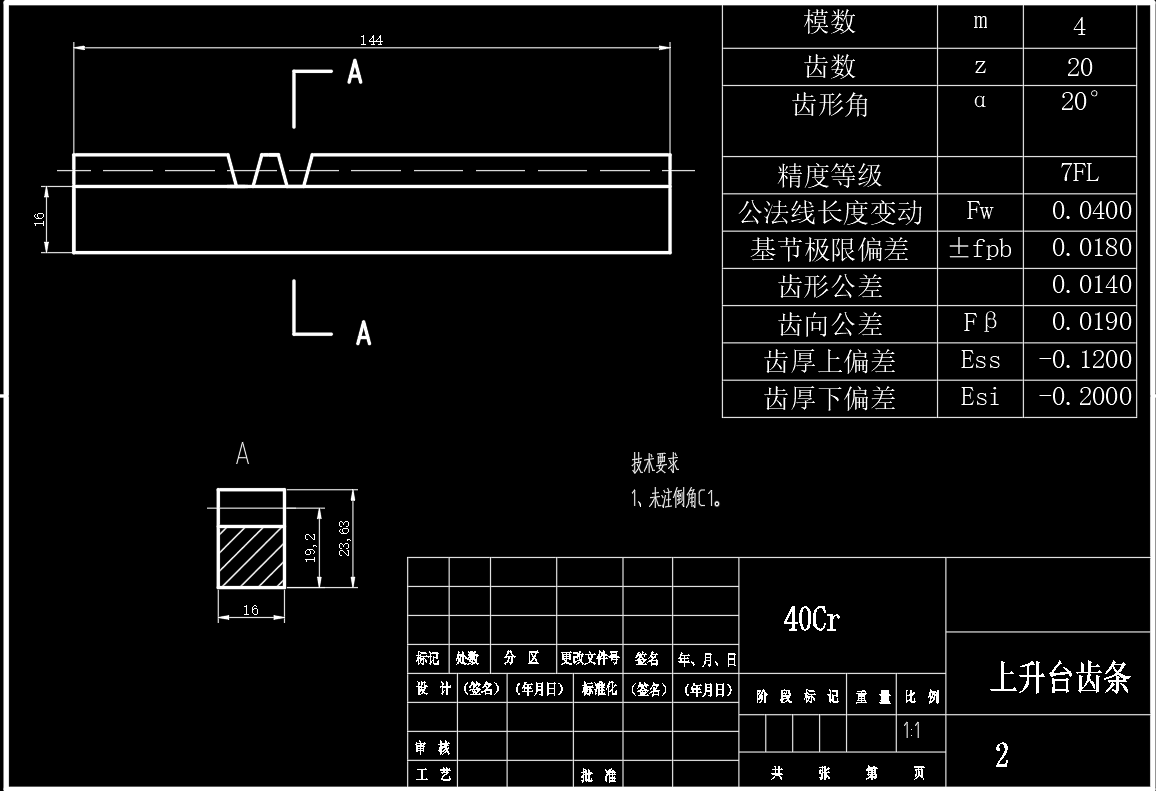
柑橘采摘机机械臂结构设计与计算(五自由度的工业柑橘采摘机器人)
来源: 阅读:1794
网站管理员
发布于 2026-02-03 16:20
查看主页
五自由度机械臂是柑橘采摘机的核心执行部件。其结构设计需兼顾作业范围、灵活性与轻量化。通常采用旋转基座、肩部、肘部及两个腕部关节的串联构型,以实现接近人手的空间定位与姿态调整能力。关键计算包括各关节的力矩校核,以确保能稳定持握并分离果实;同时进行整体刚度分析,防止末端抖动。合理的结构设计与严谨的计算,为采摘动作的精准与高效奠定了坚实基础,相关学习资料可供深入参考。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
机械设计资料
相关推荐
电动葫芦毕业设计全部
01/18
56
φ0.9x3m四筒平衡节能球磨机设计(cad+pro+说明书)
04/09
31
转速器盘机械加工工艺规程及工艺装备设计(论文+CAD图纸+工序卡)
04/04
52
CA6410车床拨叉831006三套完整设计全套图
04/07
42
精密滚珠丝杠(KUT2020L-820-200-B1)SolidWorks+stp
01/13
79
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn