机械设计资料
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
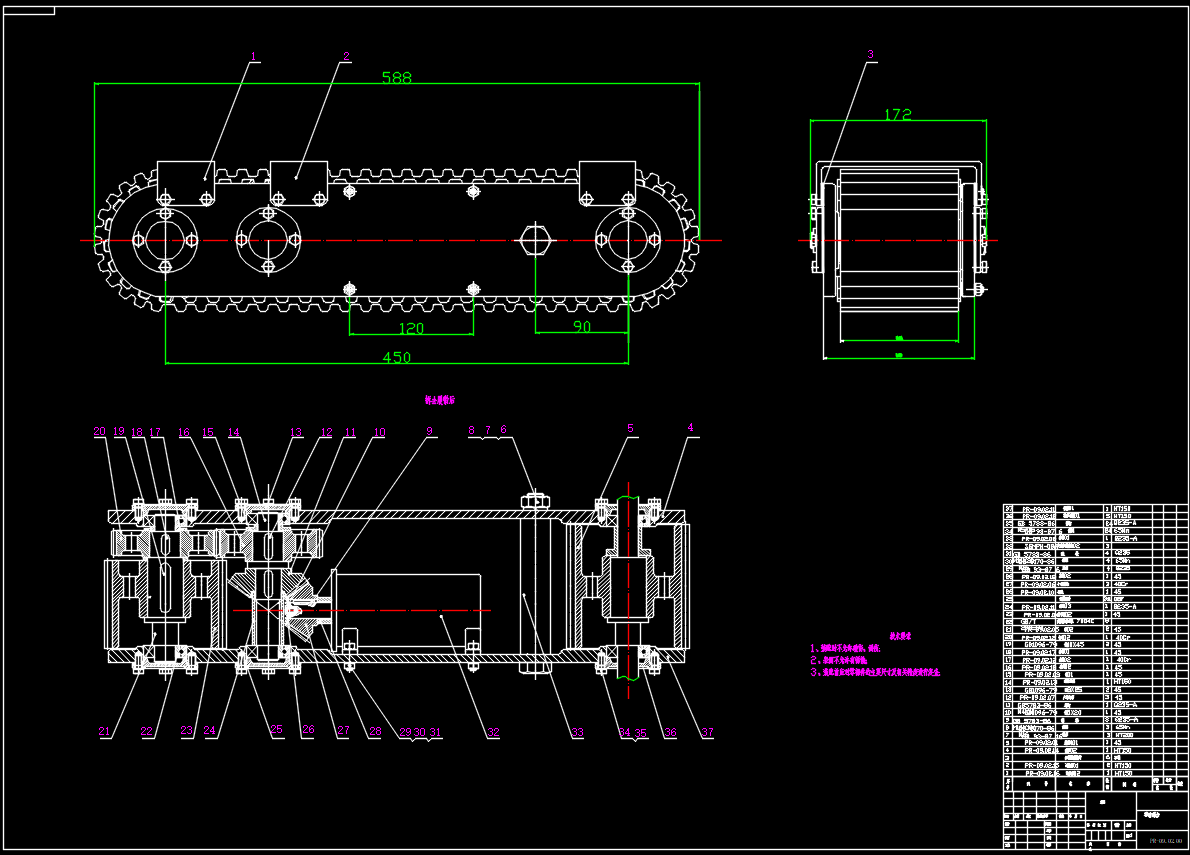
毕业设计——履带式救援机器人的设计
来源: 阅读:60
网站管理员
发布于 2026-02-02 05:50
查看主页
履带式救援机器人专为复杂灾后环境设计。其宽大履带具备出色越障与地形适应能力,能稳定进入人员难以抵达的危险区域。主体结构采用模块化理念,便于关键功能单元的快速整合与后续调整。通过搭载生命探测与图像传输模块,机器人能实时回传现场信息,为救援决策提供关键支持。该设计注重实战可靠性,旨在显著缩短开发周期,其结构方案与学习资料对相关领域具有参考价值。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
机械设计资料
相关推荐
地上24层 地下1层 高69.6米 某小区2#楼设计
01/26
55
本科毕业设计——轴向柱塞泵设计(论文+CAD图纸+文件综述)
01/28
66
拨杆零件的加工工艺,设计铣尺寸14的铣床夹具全套课程设计
04/10
41
单绳缠绕式双卷筒矿井提升机的设计(开题报告,外文翻译,毕业论文说明书23000字,CAD图纸7张)
04/09
38
某型自动垂直提升仓储系统方案论证及关键零部件的设计(论文+CAD图纸+开题报告)
04/02
42
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn