机械设计资料
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
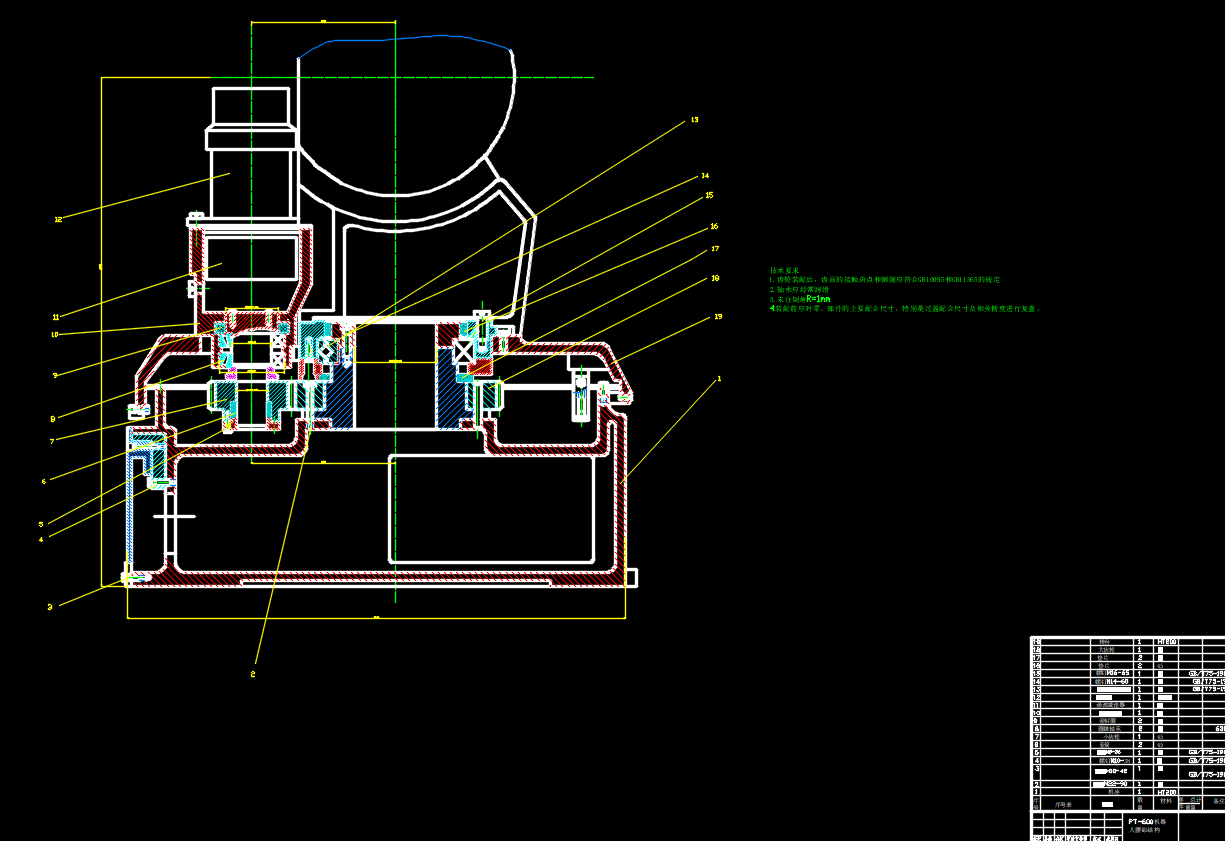
5自由度焊接机器人设计(设计说明书+CAD图纸+开题报告)
来源: 阅读:67
网站管理员
发布于 2026-02-02 02:50
查看主页
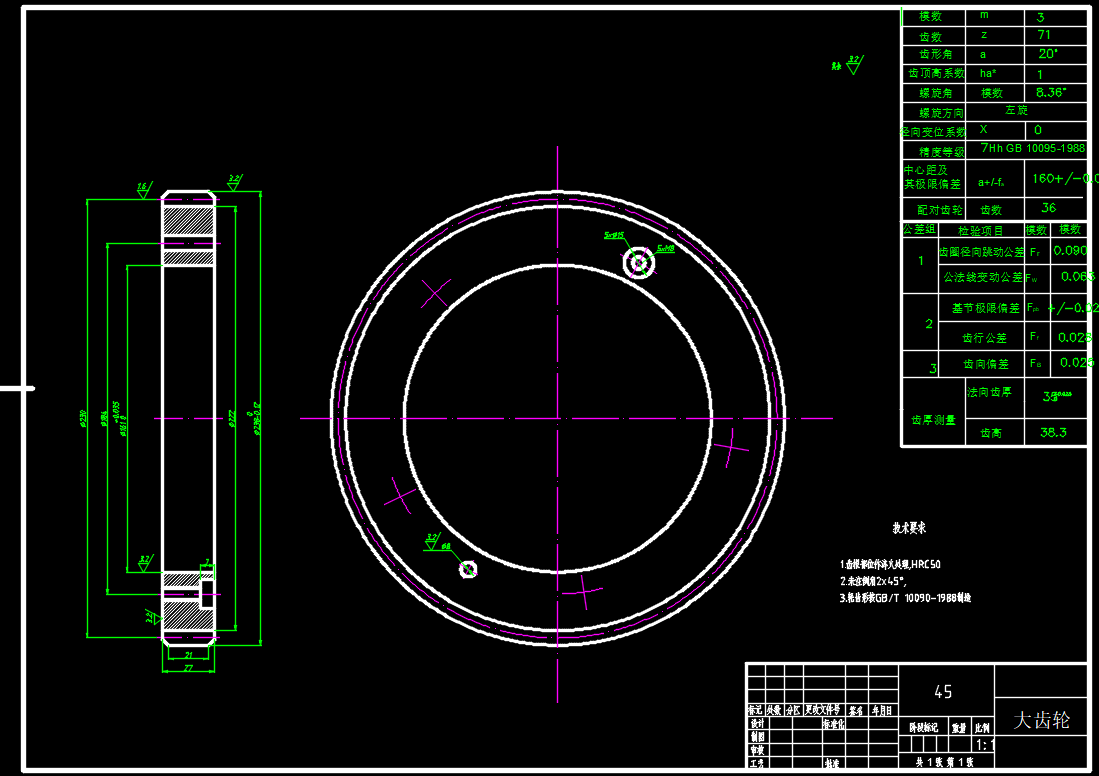
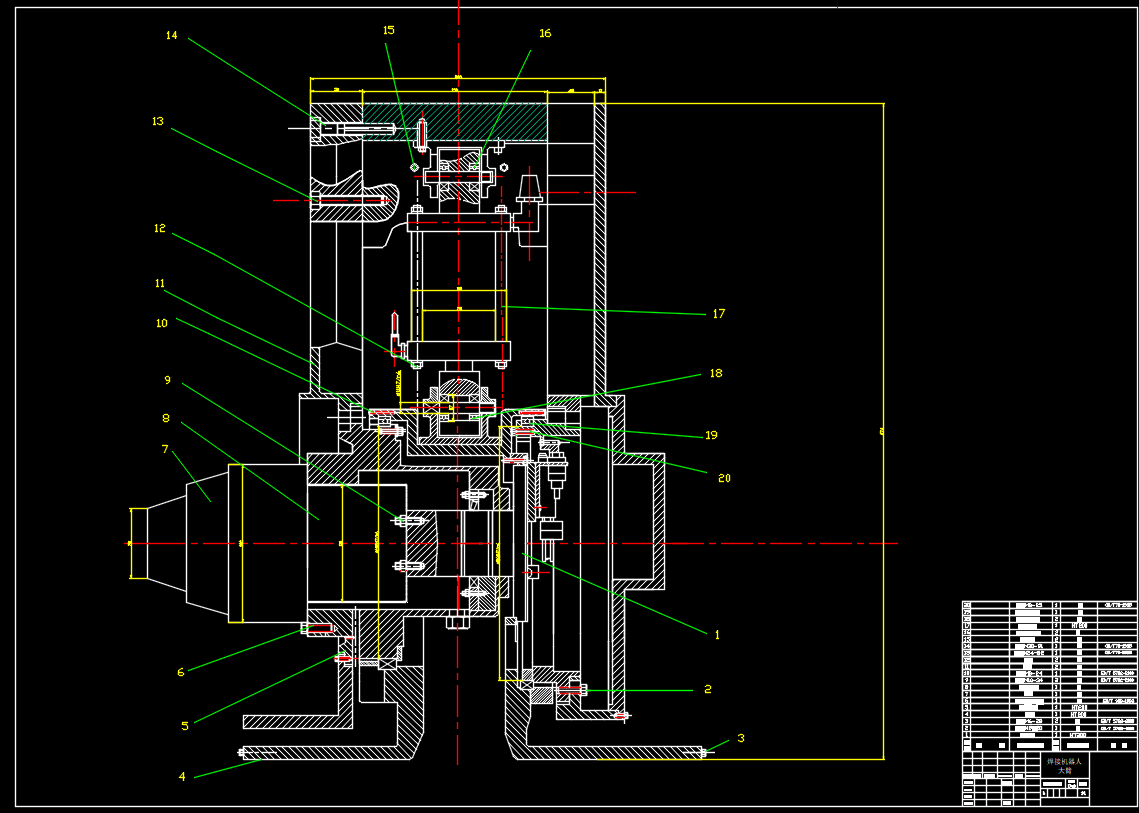
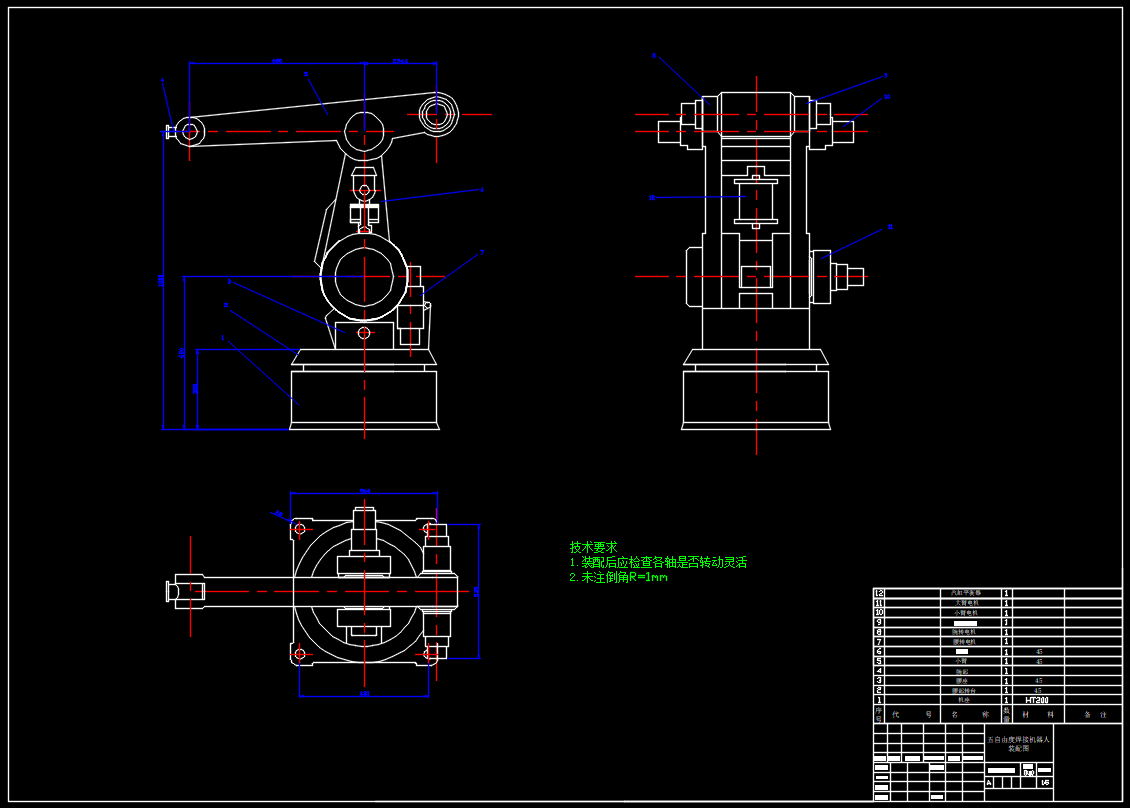
针对5自由度焊接机器人的设计,其核心在于实现灵活精准的空间作业。该结构通过五个旋转关节的协调运动,使焊枪能够以多种姿态抵达复杂焊缝位置。设计过程涵盖了从整体构型、关键部件选型到运动学分析的完整链条。关节的布局与尺寸经过反复优化,在确保工作范围的同时,也兼顾了结构刚度与运动稳定性。相关的学习资料详细呈现了各部分的配合关系与设计依据,对理解此类机器人的构造具有直接的实用参考价值。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
机械设计资料
相关推荐
75m³氯乙烯悬浮聚合反应器设计【论文+CAD图纸+开题报告】
02/06
68
升降器外壳冲孔拉伸复合模设计(设计论文+CAD图纸) 零件名称:玻璃升降器
02/02
63
盖”零件的工艺规程及钻孔夹具设计(论文+DWG图纸)
03/28
30
同轴式二级圆柱齿轮减速器的设计(论文+DWG图纸) 装配图 低速轴 高速轴 中间轴 斜齿轮 轴承盖
04/01
47
立式加工中心主轴组件的结构设计(毕业论文+CAD装配图 零件图)
02/08
54
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn